您当前的位置:首页>论文资料>装载机的应急转向控制系统
内容简介
 装载机的应急转向控制系统张建崔永国
装载机的应急转向控制系统张建崔永国随着我国装数机质量的普遍提高,目前已有很多型号产品打入欧盟,北美等地区市场装载机自身质量大,其行驶过程中惯性较大若装载机转向时转向系统出现故障,后果将不堪设想。故上述地区要求装载机配备2套转向系统,即常规转向系统和应急转向系统,并增
设手动开启和自动开启应急转向功能。当发动机娘火或常规转向系统发生故障失效时,可手动或自动切换到应急转向系统,以保证装载机转向系统安全、可靠。本文主要介绍装载机应
急转向控制系统组成和控制模式。 1.系统组成
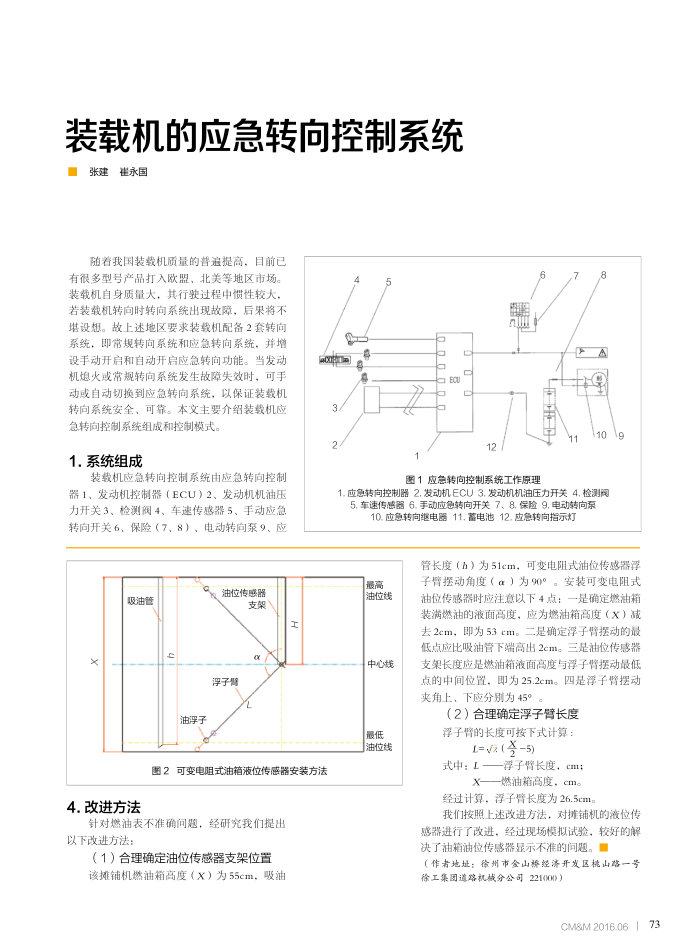
装载机应急转向控制系统由应急转向控制器1、发动机控制器(ECU)2、发动机机油压力开关3、检测阀4、车速传感器5、手动应急转向开关6、保险(7、8)、电动转向泵9、应
油位传感器
吸油管
油浮子
浮子臂
支架
x
12
图1应急转向控制系统工作原理
A
1.应急转向控制器2.发动机ECU3.发动机机油压力开关4.检测阀 5.车速传感器6.手动应急转向开关7、8.保险9.电动转向系
10.应急转向继电器11.蓄电池12.应急转向指示灯
管长度(h)为51cm,可变电阻式油位传感器浮
最高油位线
中心线最低油位线
图2可变电阻式油箱液位传感器安装方法
4.改进方法
针对燃油表不准确问题,经研究我们提出以下改进方法:
(1)合理确定油位传感器支架位置该摊铺机燃油箱高度(X)为55cm,吸油
子臂摆动角度(α)为90°。安装可变电阻式油位传感器时应注意以下4点:一是确定燃油箱装满燃油的液面高度,应为燃油箱高度(X)减去2cm,即为53cm。二是确定浮子臂摆挥动的最低点应比吸油管下端高出2cm。三是油位传感器支架长度应是燃油箱液面高度与浮子臂摆动最低点的中间位置,即为25.2cm。四是浮子臂摆动夹角上、下应分别为45°,
(2)合理确定浮子臂长度浮子臂的长度可按下式计算:
L=V(5)
式中:L-
浮子臂长度,cm;
X一―燃油箱高度,cm。
经过计算,浮子臂长度为26.5cm
我们按照上述改进方法,对铺机的渡位传感器进行了改进,经过现场模拟试验,较好的解决了油箱油位传感器显示不准的问题。
(作地址:徐州市金山桥经济开发区桃山路一号徐工集团道路机载分公司221000)
CM&M 2016.06 1 73
上一章:张明月和他的雷沃旋挖钻机
下一章:装车机行走台车存在问题及改进方法