您当前的位置:首页>论文资料>基于数字PID的智能小车的控制
内容简介
 数事共来与表用
数事共来与表用基于数字PID的智能小车的控制
隋妍
(西南大学计算机与信息科学学院软件学院重庆400715)
数控技术
摘要:驾能小车采用的是飞卡尔车导体公司的16bit微控制器MC9S12XS128.采用的控制算法为控制理论中最为经典的数字PID控制,具体的实现方法为通过摄像头作为传感器案集前方轨违(黑线),特来集的信息通过最小二乘法的拟合,得到运行轨连,通过控制器的处理,将得到的信息传给执行器(电机,能机),从而控制小车的行驶造度及转向,实现对小车的自动寻迹行驶,本文主要介绍的是数字PID控制器的设计,并在原有数宇PID的基确上加入积分分离,并利用MATLAB仿真证明其优越性,实现了智能小车的更优控制。
关键调:数字PID控制智能小车参数整定积分分离
中图分类号:TP273
文献标识码:A
文章编号:1007-9416(2012)06-0003-02
随着自动控制技术及控制理论的发展,可以实现小车的智能化,即通过硬件与软件的相互结合,并将控制策略嵌人其中,使小车
能够按照人们所设定的路线(即轨道中的黑线)行驶。 1、系统分析
本智能小车是通过电机控制其行驶速度,通过能机控制器其行驶的方向,当摄像头采集到路况信息后,根据当前的行驶状态,控制器输出控制策略,控制小车的电机和能机,实现速度及行驶方向的改变。整体控制过程如下图一:
开始,业
参数初始化采样。
能机参数设
业控制能机。位置检测位置反馈。
路况信息判断
图一智能小车整体控制过程
电机参数设控制电机。速度检测-速度反馈。
为了使小车具有更高的灵敏度,我们在最大限度内增加了视场的范图,如此便可在最短的时间内采集到更多的轨道信息,并保证在弯道时黑线不丢失,
智能车通过对赛道的方向、宽度、偏移量、曲率等信息的采集计算出赛道中心线的位置,并将赛道分为三类:直道、S型,弯道,不
同的赛道采用不同的控制策略。 2、控制方案
2.1参数整定方法
PID整定的方法有两种:一是理论计算整定法。由于智能车的整个系统是机电高耦合的分布参数系统,并且要考虑赛道具体环境,要建立精确的数学模型有一定难度二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单,我们主要采用的是经验法。
2.2控制策略实现 2.2.1电机教制策略
智能车速度的改变是通过改变MC9S12DG128输出的PWM信号来控制直流驱动电机,频率不变时,改变占空比,来改变电机两缩
的工作电压,从而改变电机的转动速度,进面改变小车的行驶速度。
我们对电机采用的整体控制策略为直道加速,套道减速。在直道的情况下,由于此时轨道基本无变化,为使小车以一个稳定的、较高的速度行驶,可以省略微分项,而在S型轨道上,需要较高的反应速度,故比例的作用变大,并加人微分项使小车及时对路况做出反应,对于弯道,则增强了微分项的作用,削弱了比例项的作用,以使小车顺利通过,不致冲出轨道。具体参数如下表一:
表一电机PID参数表
路况直道 S型弯道
Kp 2 6.5 3.5
Ki 3
1.5
Kd 0-2
获得K。K,、K,参数的具体的方法为;将小车在一段直线赛道上运行,通过程序设定不同的参数值,并记录在不同参数情况下小车的启动、制动及减速过程(启动、制动、减速都是通过程序人为的设定,而不是通过摄像头采集的路况信息),选择使其反应时间最短、运行最为稳定的参数。2
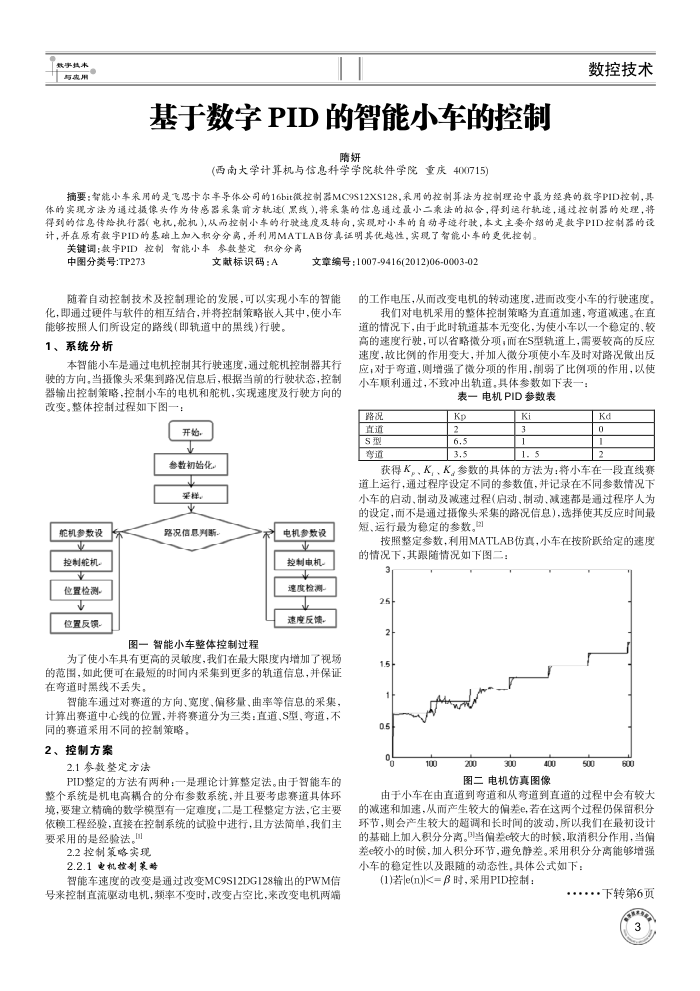
按照整定参数,利用MATLAB仿真,小车在按阶跃给定的速度的情况下,其跟随情况如下图二:
3 2.5
100
200
300
400
图二电机仿真图像
500
600
由于小车在由直道到弯道和从弯道到直道的过程中会有较大的减速和加速,从而产生较大的偏差e,若在这两个过程仍保留积分环节,则会产生较大的超调和长时间的波动,所以我们在最初设计的基础上加人积分分离。当偏差e较大的时候,取消积分作用,当偏差e较小的时候,加人积分环节,避免静差。采用积分分离能够增强小车的稳定性以及跟随的动态性,具体公式如下:
(1)若le(n)<=β时,采用PID控制:
,下转第6页