����ǰ��λ�ã���ҳ>��������>����˫CPU��ĥ������ϵͳ
����˫CPU��ĥ������ϵͳ
���ݼ��
 ���ؼ���
���ؼ�������˫ CPU��ĥ������ϵͳ
������
(���ݵ��ӿƼ���ѧ�㽭����310018)
����ִ��������
ժҪ��¹����һ�ֶԿ��ƾ���Ҫ��ϸߵĹ����ӹ�������ĥ��ͨ����ɰ�ֺ�����ס�õĿ�����ʵ�ֶ�ĥ�����Ŀ���,����ϵͳ�Խ��������ƾ��ȵĸߵͽ����ĥ���ӹ����Ȳ���ֱ��Ӱ�죬��ͳ�Ļ����˶����ƿ���ĥ������ϵͳ�۸��Ϊ����ϵͳ��չ�ԲΪ�˽���������⣬���������һ�ֻ���˫CPU�ķ�������ϵͳ,�Խϵ͵ļ۸�ʵ���Դ��ĸ߾��ȿ��ơ�
�ؼ��ʣ�����ARMDSP�˶�������ͼ����ţ�TP271
1����
���ױ�ʶ��:A
ĥ����һ������ĥ�߶Թ����������ĥ���ӹ��Ļ������������ĥ����ʹ�ø�����ת��ɰ�ֽ���ĥ���ӹ�����������ĥ��������ϵͳͨ���ı�ɰ�ֺ���֮������λ����������ǰ������˶Թ����������Ŀ��ƶԼӹ�����������Ҫ��Ӱ�죬��ͳ��ĥ������ϵͳ�����˶����ƿ���Ϊ���ƺ��ģ����˶����ƿ��ǻ���PC���ߵģ�ʹ���˶����ƿ���ʱ������Ϊ���䱸PC������͵������ֿ���ϵͳ�۸��Ϊ�����������һ�ֻ���˫CPU��Ƕ��ʽĥ������ϵͳ������ARM��������ʵ�������ﴦ��������DSP��������ʵ���˶����ƣ�ͨ��˫CPU֮������ݹ�������ʵ��˫CPU��Э����
�����Դ˴ﵽĥ���ĸ߾��ȿ��ơ� 2ϵͳʵ��
2.1ϵͳ�ܹ�
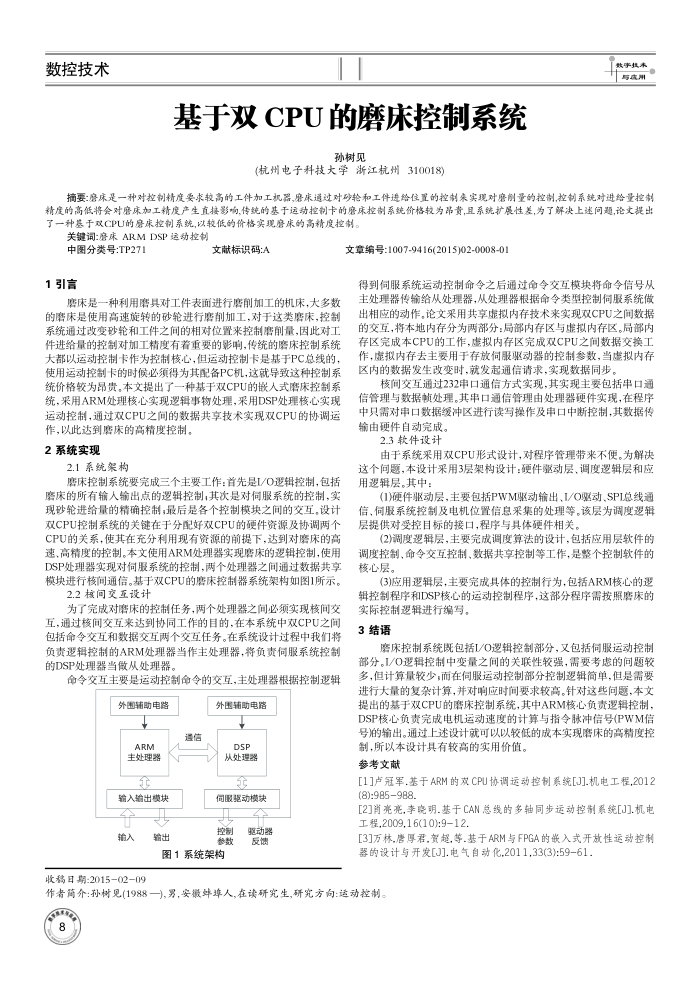
ĥ������ϵͳҪ���������Ҫ������������I/O�����ƣ�����ĥ�����������������������ƣ�����Ƕ��ŷ�ϵͳ�Ŀ��ƣ�ʵ��ɰ�ֽ������ľ�ȷ���ƣ�����Ǹ�������ģ��֮��Ľ��������˫CPU����ϵͳ�Ĺؼ����ڷ����˫CPU��Ӳ����Դ��Э������ CPU�Ĺ�ϵ��ʹ���ڳ������������Դ��ǰ���£��ﵽ��ĥ���ĸ��١��߾��ȵĿ��ơ�����ʹ��ARM������ʵ��ĥ���������ƣ�ʹ�� DSP������ʵ�ֶԺη�ϵͳ�Ŀ��ƣ�����������֮��ͨ�����ݹ���ģ����к˼�ͨ�š�����˫CPU��ĥ��������ϵͳ�ܹ���ͼ1��ʾ��
2.2�˼佻�����
Ϊ����ɶ�ĥ���Ŀ�����������������֮�����ʵ�ֺ˼佻����ͨ���˼佻�����ﵽЭͬ������Ŀ�ģ��ڱ�ϵͳ��˫CPU֮���������������ݽ�����������������ϵͳ��ƹ��������ǽ����������Ƶ�ARM���������������������������ŷ�ϵͳ���Ƶ�DSP�����������Ӵ�����
�������Ҫ���˶���������Ľ����������������ݿ�����
��Ȧ������·
��Χ������·
+
ARM ��������
�������ģ��
��
����
�ո����ڣ�2015-02-09
���
����
DSP �Ӵ�����
�ŷ�����ģ��
���Ƽ���
ͼ1ϵͳ�ܹ�
����������
���±��:1007-9416(2015)02-0008-01
�õ��ŷ�ϵͳ�˶���������֮��ͨ�������ģ�齫�����źŴ���������������Ӵ��������Ӵ����������������Ϳ��Ƽ��ϵͳ������Ӧ�Ķ��������IJ��ù��������ڴ漼����ʵ��˫CPU֮�����ݵĽ������������ڴ��Ϊ�����֣��ֲ��ڴ����������ڴ������ֲ��ڴ�����ɱ�CPU�Ĺ����������ڴ������˫CPU֮�����ݽ��������������ڴ�ȥ��Ҫ���ڴ�źη��������Ŀ��Ʋ������������ڴ����ڵ����ݷ����ı�ʱ���ͷ���ͨ������ʵ������ͬ����
�˼佻��ͨ��232���ͨ�ŷ�ʽʵ�֣���ʵ����Ҫ��������ͨ�Ź����������������䴮��ͨ�Ź����ɴ�����Ӳ��ʵ�֣��ڳ�����ֻ��Դ������ݻ��������ж�д����������жϿ��ƣ������ݴ�����Ӳ���Զ���ɡ�
2.3�������
����ϵͳ����˫CPU��ʽ��ƣ��Գ�������������㡣Ϊ���������⣬����Ʋ���3��ܹ���ƣ�Ӳ�������㡢���������Ӧ�����㡣���У�
(1)Ӳ�������㣬��Ҫ����PWM���������I/O������SPL����ͨ�š��ŷ�ϵͳ���Ƽ����λ����Ϣ�ɼ��Ĵ����ȡ��ò�Ϊ���������ṩ���ܿ�Ŀ��Ľӿڣ����������Ӳ����ء�
(2)�������㣬��Ҫ��ɵ����㷨����ƣ�����Ӧ�ò������ĵ��ȿ��ơ���������ơ����ݹ������Ƶȹ��������������������ĺ��IJ㡣
(3)Ӧ�����㣬��Ҫ��ɾ���Ŀ�����Ϊ������ARM���ĵ������Ƴ����DSP���ĵ��˶����Ƴ����ⲿ�ֳ����谴��ĥ����
ʵ�ʿ��������б�д�� 3����
ĥ������ϵͳ�Ȱ���/O�����Ʋ��֣��ְ����ŷ��˶����Ʋ��֡�/O�������б���֮��Ĺ����Խ�ǿ����Ҫ���ǵ�����϶࣬�����������٣������ŷ��˶����Ʋ��ֿ�������������Ҫ���д����ĸ��Ӽ��㣬������Ӧʱ��Ҫ��ϸߡ������Щ���⣬��������Ļ���˫CPU��ĥ������ϵͳ������ARM���ĸ��������ƣ� DSP���ĸ�����ɵ���˶��ٶȵļ�����ָ�������ź�(PWM�źŵ������ͨ��������ƾͿ����Խϵ͵ijɱ�ʵ��ĥ���ĸ߾��ȿ�
�ƣ����Ա���ƾ��нϸߵ�ʵ�ü�ֵ���ο�����
[1]¬�ھ�.����ARM��˫CPUЭ���˶�����ϵͳ[J].���繤��,2012(8):985988.
[2]Ф����,������.����CAN���ߵĶ���ͬ���˶�����ϵͳ[J].���繤��,2009,16(10):912.
[3]����.�ƺ��.�س�,��.����ARM��FPGA��Ƕ��ʽ�������˶�������������뿪��[3].�����Զ���,2011,33(3):59-61.
����飺������(1988һ),�У���������,�ڶ��о���,�о������ʶ����ơ�
�������
����˫CPU�����ܶ��������ȷ����������
���ڵ�Ƭ����ĥ��ɰ�ֶ�ƽ����ϵͳ�����
���ڵ�Ӵ����Զ�ĥ�����߲���ϵͳ�о������
����CPLD�MFPGA��CPU���
���ڻ�ɫԤ��ģ�͵�MKB1632�MH������Բĥ������ϵͳ���Ϸ���
����EDA�����ĵ�����CPU�����ʵ�֣���������ԭ��ʵ��
JB/T 9907.3-2014 ˫����ĥ�� ��3���֣�����˫����ĥ�����ȼ���
JB/T 9907.4-2017 ˫����ĥ�� ��4���֣�����˫����ĥ�� ���ȼ���