轮胎式工程机械转向轮转向角度指示系统的设计
内容简介
 轮胎式工程机械转向轮转向角度
轮胎式工程机械转向轮转向角度指示系统的设计王庆祝顾程鹏
-些特殊结构的轮胎式工程机械,其驾驶员
无法直接观察转向轮的转向角度。在工程机械举爬平板拖车时,若不能掌握转向轮的转向角度,极易发生侧翻事故。本文阐述的转向角度指示系统,旨在给工程机械驾驶员提供转向轮转向角度信息,给驾驶员准确控制转向角度提供方便,以
提高工程机械转向操纵的安全性。 1.系统组成
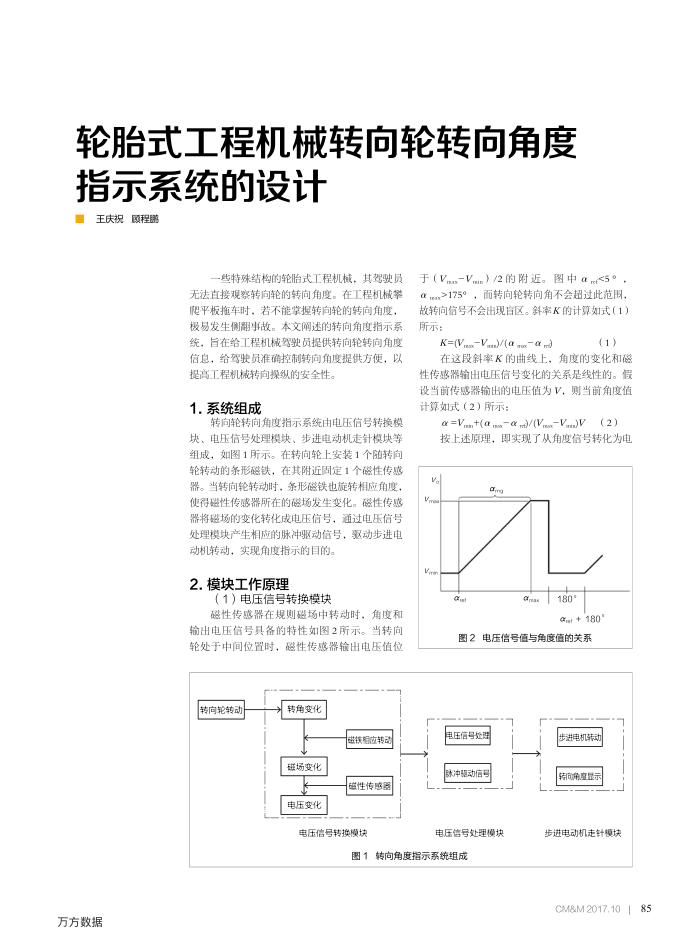
转向轮转向角度指示系统由电压信号转换模块、电压信号处理模块、步进电动机走针模块等组成,如图1所示。在转向轮上安装1个随转向轮转动的条形磁铁,在其附近固定1个感性传感器。当转向轮转动时,条形感铁也旋转相应角度,使得磁性传感器所在的磁场发生变化。磁性传感器将磁场的变化转化成电压信号,通过电压信号处理模块产生相应的脉冲驱动信号,动步进电
动机转动,实现角度指示的目的。 2.模块工作原理
(1)电压信号转换模块
磁性传感器在规则磁场中转动时,角度和输出电压信号具备的特性如图2所示。当转向轮处于中间位置时,磁性传感器输出电压值位
转向轮转动
万方数据
转角变化
磁铁相应转动
磁场变化
磁性传感器
电压变化
电压信号转换模块
于(V.asV.in)/2的附近。图中ar<5 α>175°,而转向轮转向角不会超过此范围,故转向信号不会出现言区。斜率K的计算如式(1)所示:
K=(VxV)/(a mα n)
(1)
在这段斜事K的曲线上,角度的变化和懿性传感器输出电压信号变化的关系是线性的。假设当前传感器输出的电压值为V,则当前角度值计算如式(2)所示:
α =V..+(amα)/(VxV.)V
(2)
按上述原理,即实现了从角度信号转化为电
am
nas
180
Or +180
图2电压信号值与角度值的关系
电压信号处群脉冲驱动信号
电压信号处理模块
图1转向角度指示系统组成
步进电机转动转向角度显示
步进电动机走针模块
CM&M 2017.10 1 85