您当前的位置:首页>论文资料>基于动态窗口的足球机器人搜索算法研究
内容简介
 款事致来与成用
款事致来与成用算法分析
基于动态窗口的足球机器人搜索算法研究
陈勇温雅
(石家庄市第一医院河北石家庄050011)
摘要:机器人足球是近几年在国际上迅速开展起来的高技水对抗活动,世界各国纷纷派队参加比赛。比赛中的足球机器人,融含了多个领域的知识,包括机器人、自动控制、机械学、通信、传感、图像处理、视识别及人工智能等。足球机器人分为两大系列:MiroSot系列和 RobCup系列。MiroSot系列足球机器人主要由视觉子系统、决策子系统、通讯系统、机器人小车系统四部分组成。本文期速MiroSot系列足球机器人日标捷索算法,
关键词:动态窗口
足球机器人日标推索
中图分类号:TP242.6
文献标识码:A
文章编号:1007-9416(2013)06-0133-01
1多目标视觉跟踪是多目标跟踪的理论和方法与计算机视觉技术的结合
目的是通过对图像序列进行分析,连续跟踪图像中的运动目标。常用的多目标视觉跟踪方法有两种
(1)基于滤波器预测的多目标视觉跟踪方法根据多目标跟踪数据关联理论,以目标当前位置采用滤波器预测运动目标下一慎图像的位置,缩小目标搜索范围,并用新的观测值去修正预测结果。
(2)基于特征的多目标视觉跟踪方法其思想是识别图像序列中目标的特征,对多目标进行连续跟踪。例如利用投影特征的形心跟踪方法,实时标记的多目标测量跟踪和加权修正模板的图像相关跟踪方法等。
2基于动态窗口与颜色索引表相结合的目标搜索跟踪
2.1基于动态富口与颜色案引表相结合的目标搜索通过对足球机器人视觉系统的分析,依据视觉系统处理图像连
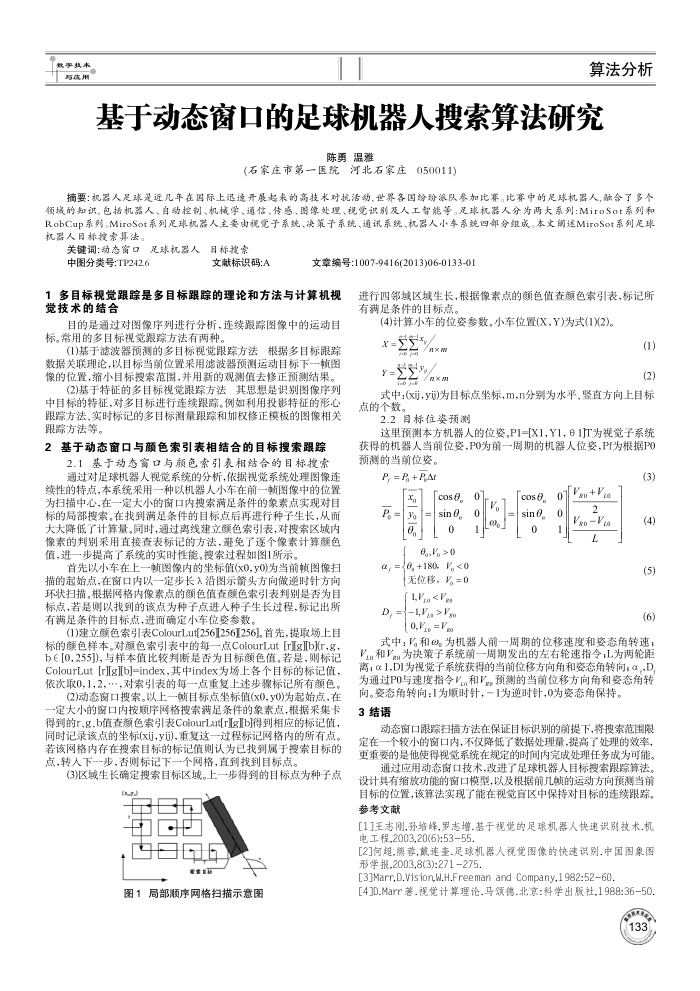
续性的特点,本系统采用一种以机器人小车在前一赖图像中的位置为扫描中心,在一定大小的窗口内搜索满足条件的象素点实现对目标的局部搜索。在找到满足条件的目标点后再进行种子生长,从而大大降低了计算量。同时,通过离线建立颜色索引表,对搜索区域内像素的判别采用直接查表标记的方法,避免了逐个像素计算颜色值,进一步提高了系统的实时性能,搜索过程如图1所示。
首先以小车在上一慎图像内的坐标值(x0,y0)为当前慎图像扫描的起始点,在窗口内以一定步长入沿图示箭头方向做逆时针方向环状扫描,根据网格内像素点的额色值查额色索引表判别是否为目标点,若是则以找到的该点为种子点进人种子生长过程,标记出所有满足条件的目标点,进而确定小车位姿参数,
(1)建立颜色索引表ColourLut[256][256[256]首先,提取场上目标的颜色样本。对颜色索引表中的每一点ColourLut[rlgl[b](r,g, bE[0,255]),与样本值比较判断是否为目标颜色值著是,则标记 ColourLut[rl[gl[b]=index,其中index为场上各个目标的标记值,依次取0,1,2,,对索引表的每一点重复上述步骤标记所有颠色。
(2)动态窗口搜索。以上一慎目标点坐标值(x0,y0)为起始点,在定大小的窗口内按顺序网格搜索满足条件的象素点,根据采集卡
得到的r.g、b值查颜色索引表ColourLut[r[g[b]得到相应的标记值,同时记录该点的坐标(xij,yi),重复这一过程标记网格内的所有点。若该网格内存在搜索目标的标记值则认为已找到属于搜索目标的点,转人下一步,否则标记下一个网格,直到找到目标点。
(3)区域生长确定搜索目标区域。上一步得到的目标点为种子点
)
6B6 海
e
服e
图1局部顺序网格扫描示意图
进行四邻域区域生长,根据像素点的颜色值查颜色索引表,标记所有满足条件的目标点。
(4)计算小车的位姿参数,小车位置(X,Y)为式(1)(2)。 r-y
27xm
nxn
(1)(2)
式中:(xij,yij)为目标点坐标,m,n分别为水平、竖直方向上目标点的个数。
2.2目标位资预测
这里预测本方机器人的位姿。P1=[X1,Y1,61T为视觉子系统获得的机器人当前位姿,PO为前一周期的机器人位,Pf为根据PO 预测的当前位姿。
P, = P + Par
cos6
P=
=sin o.
0 6,,V>0
0 0
a, =, +180, V, 0
无位移,%=0 1, Vre
0, V.=V.
cos6 sino. 0
[Veo +Vre
3 Ve-Vue
(3)(4)(5)(6)
式中:V%和0,为机器人前一周期的位移速度和姿态角转速; V。和V.为决策子系统前一周期发出的左右轮速指令L为两轮距离,α1,DI为视觉子系统获得的当前位移方向角和姿态角转向α,,D 为通过PO与速度指令V.和V。预测的当前位移方向角和姿态角转
向。资态角转向:1为顺时针,一1为逆时针,0为资态角保持 3结语
动态窗口跟踪扫描方法在保证目标识别的前提下,将搜索范围限定在一个较小的窗口内,不仅降低了数据处理量,提高了处理的效率,更重要的是他使得视觉系统在规定的时间内完成处理任务成为可能。
通过应用动态窗口技术,改进了足球机器人目标搜索跟踪算法。设计具有缩放功能的窗口模型,以及根据前几慎的运动方向预测当前目标的位置,该算法实现了能在视觉盲区中保持对目标的连续跟踪。参考文献
[1]王志刚,孙培峰,罗志增.基于视觉的足球机器人快速识别技术.机电工程.2003,20(6):5355
[2]何超.熊蓉,戴连变.足球机器人视觉图像的快速识别.中国图象图形学报.2003,8(3):271-275
[3JMarr,D.Vision,w.H.Freeman and Company,1982:5260.
[4JD.Marr著.视觉计算理论.马领德.北京:科学出版社,198B:36-50.
133
上一章:机器人控制系统中寻迹和避障策略的设计
下一章:机器人-章鱼保罗-的设计与实现