您当前的位置:首页>论文资料>基于蚁群算法的多农业机器人路径规划研究
内容简介
 数字执车与度用
数字执车与度用算法分析
基于蚁群算法的多农业机器人路径规划研究
张衡
(郑州大学物理工程学院河南郑州450001)
摘要:随着计算机技术、信息技术、人工智能理论、传感器等技术的快速发展机器人的研究到达了一个新的高度。针对多机器人群体作业容易出现路露径冲突和硅撞的间题,本文基于取群算法,设计和研究了多农业机器人路径规划和导航系统,实现了多农业机器人移动路径的实时动态规划和自主导航功能,为机器人进一步发展提供了一定的理论基础。
关键词:取群算法;农业机器人;露径规划;导航
中图分类号:TP242
文献标识码:A
近年来,人工智能已成为新一轮工业革命的基石,其不仅广泛应用于工业控制领域,在农业生产中的应用越来越普及。在农忙时节,农场往往会出现劳动力大量贾乏的现象,因此,机器人在农业上的应用需求越来越明显。研发出一种能进行远程控制的农业机器人,代替传统人力的作业操作,对提高农业生产水平、提高种植效率具有重要意义,同时也是现代化农业的发展趋势,本文根据农业机器人作业环境,采用蚊群算法,结合先全局后局部的路径规划方法,
设计和研究了一种多农业机器人路径规划和导航系统。 1蚊群算法简述
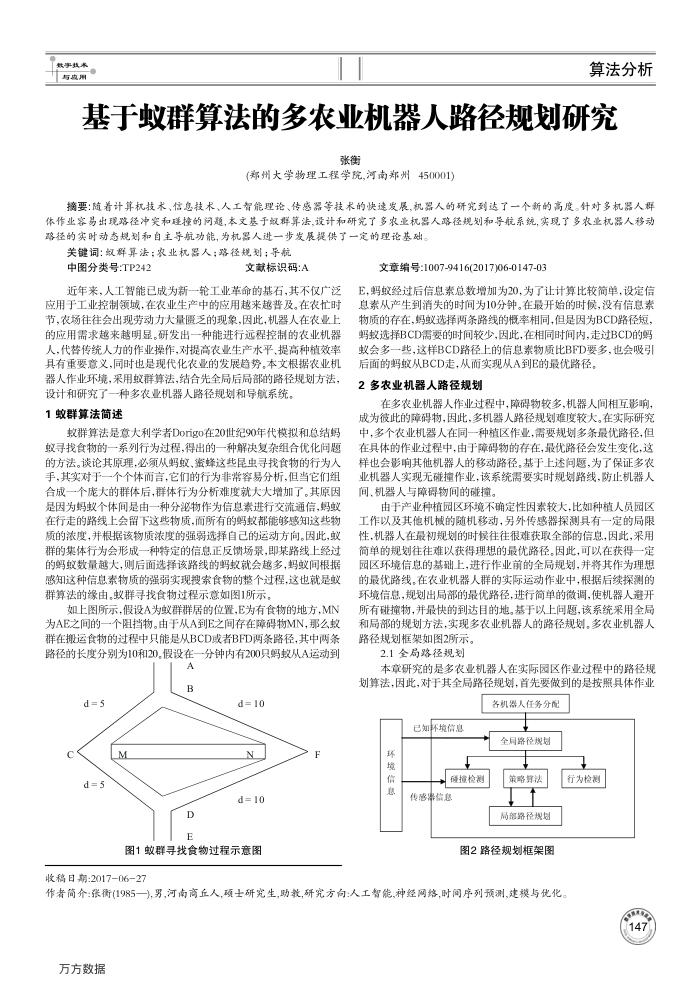
蚁群算法是意大利学者Dorigo在20世纪90年代模拟和总结蚂蚊寻找食物的一系列行为过程,得出的一种解决复杂组合优化问题的方法。谈论其原理,必须从蚂蚊、蛋蜂这些昆虫寻找食物的行为人手,其实对于一个个体而言,它们的行为非常容易分析,但当它们组合成一个庞大的群体后,群体行为分析难度就大大增加了。其原因是因为蚂蚁个体间是由一种分泌物作为信息素进行交流通信,蚂蚁在行走的路线上会留下这些物质,面所有的蚂数都能够感知这些物质的浓度,并根据该物质浓度的强弱选择自己的运动方向。因此,蚁群的集体行为会形成一种特定的信息正反馈场景,即某路线上经过的蚂蚊数量越大,则后面选择该路线的蚂蚊就会越多,蚂蚁间根据感知这种信息素物质的强弱实现搜索食物的整个过程,这也就是蚁群算法的缘由。蚁群寻找食物过程示意如图1所示。
如上图所示,假设A为蚁群群居的位置,E为有食物的地方,MN 为AE之间的一个阻挡物。由于从A到E之闻存在障碍物MN,那么数群在搬运食物的过程中只能是从BCD或者BFD两条路径,其中两条路径的长度分别为10和20,假设在一分钟内有200只蚂数从A运动到
A B
d= 5 d= 5
M
D E
d= 10 N d=10
图1蚁群寻找食物过程示意图
收稿日期:2017-06-27
文章编号:1007-9416(2017)06-0147-03
E,蚂蚊经过后信息素总数增加为20,为了让计算比较简单,设定信息素从产生到消失的时间为10分钟。在最开始的时候,没有信息素物质的存在,蚂蚁选择两条路线的概率相同,但是因为BCD路径短,蚂数选择BCD需要的时间较少,因此,在相同时间内,走过BCD的蚂蚁会多一些,这样BCD路径上的信息素物质比BFD要多,也会吸引
后面的蚂蚊从BCD走,从而实现从A到E的最优路径。 2多农业机器人路径规划
在多农业机器人作业过程中,障碍物较多,机器人间相互影响,成为彼此的障碍物,因此,多机器人路径规划难度较大。在实际研究中,多个农业机器人在同一种植区作业,需要规划多条最优路径,但在具体的作业过程中,由于障碍物的存在,最优路径会发生变化,这样也会影响其他机器人的移动路径。基于上述问题,为了保证多农业机器人实现无碰撞作业,该系统需要实时规划路线,防止机器人间、机器人与障碍物间的碰撞,
由于产业种植园区环境不确定性因素较大,比如种植人员园区工作以及其他机械的随机移动,另外传感器探测具有一定的局限性,机器人在最初规划的时候往往很难获取全部的信息,因此,采用简单的规划往往难以获得理想的最优路径。因此,可以在获得一定园区环境信息的基础上,进行作业前的全局规划,并将其作为理想的最优路线,在农业机器人群的实际运动作业中,根据后续探测的环境信息,规划出局部的最优路径,进行简单的微调,使机器人避开所有碰撞物,并最快的到达目的地。基于以上间题,该系统采用全局和局部的规划方法,实现多农业机器人的路径规划,多农业机器人路径规划框架如图2所示。
2.1全局路径规划
本章研究的是多农业机器人在实际园区作业过程中的路径规划算法,因此,对于其全局路径规划,首先要做到的是按照具体作业
各机器人任务分配
已知坏境信息
环境信息
+
硬撞检测
传感事信息
全局路径规划
策略算法局部路径规划
图2路径规划框架图
作者简介:张衡(1985一),男,河南商丘人,颈士研究生,助教,研究方向:人工智能,神经网络,时间序列预测,建模与优化
方方数据
行为检测