您当前的位置:首页>论文资料>机器人-章鱼保罗-的设计与实现
内容简介
 数字技术与应用
数字技术与应用机器人“章鱼保罗”的设计与实现
张晴杨桂考罗凯
(徐州空军学院航空弹药系江苏徐州221000)
・自动化技术。
要:2010年足球"世界杯"期间,“预言家“章鱼保多的出现争给人们很多悬疑与你奇。本文设计了一款多足机器人,通过ATme第32 单片机调制PWM信号输出对能机进行控制,实观机器人完整模份章鱼一些优美的动作。本辰就采用模块化设计思趣,运用C语盲端程。
关键词:ATmega32单片机SR-403P轮机PWM 中图分类号:TP302
文献标识码:A
1设计思路和标准
该舞陷机器人以ATmega32单片机为核心控制器,主体由36个能机组成,腿部由三个四杆机构复合而成,具有结构紧漆,传动可靠的优点,制作前期对机器人进行运动学分析步态规划及仿真实验,并在此基础上对机器人部分机械结构予以改进,使之能够稳定实现一些预编的复杂而优美的动作。
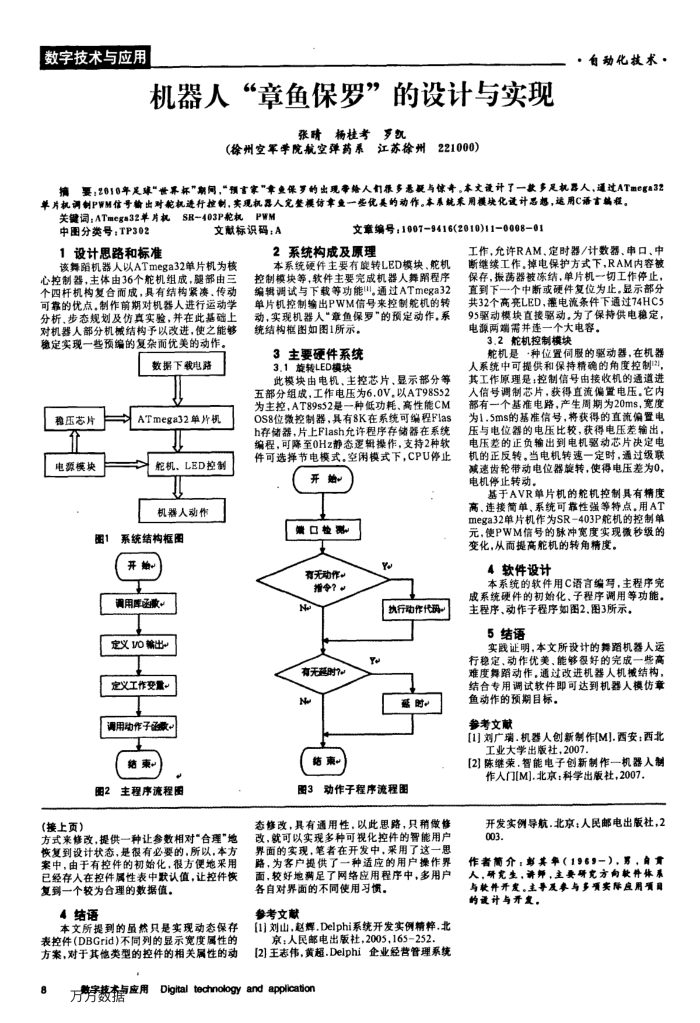
数据下载电路
稳压芯片电源模块
ATmega32单片机能机、LED控制机器人动作
围1系统结构框图
开调用库承激。定义VO输出定义工作变量。调用动作子激。
结秉
主程序流程图图2
(接上页)
方式来修改,提供一种让参数相对"合理地恢复到设计状态,甚很有必要的,所以本方案中,由于有控件的初始化,很方便地采用已经存人在控件属性表中默认值,让控件恢复到一个较为合理的数据值。
4结语
本文所提到的显然只是实现动态保存表控件(DBGrid)不同列的显示宽度属性的方案,对于其他类型的控件的相关属性的动
方芳裁糖应用
文章编号:1007-9416(2010)110008-01
2系统构成及原理
本系统硬件主要有晚转LED模块,能机控制模块等,软件主要完成机器人舞霸程序编辑调试与下载等功能"I。通过ATmega32 单片机控制输出PWM信号来控制能机的转动,实现机器人“章鱼保多的预定动作,系
统结构槛图如图1所示。 3主要硬件系统 3.1旋转LED模块
此模块由电机、主控芯片,显示部分等五部分组成,工作电压为6.0V。以AT98S52 为主控,AT89s52是一种低功耗、高性能CM OS8位微控制器,具有8K在系统可编程Flas h存储器,片上Flash允许程序存储器在系统编程,可降至0Hz静态逻辑操作,支持2种软件可选择节电模式。空闲模式下,CPU停止
开始第口检
有无动作。指争?
N
有无题时?结秉。
Ye
执行动作代码感时
围3动作子程序流程图
态修改,具有通用性,以此思路,只稍做修改,就可以实现多种可视化控件的智能用户界面的实现,笔者在开发中,采用了这一思路,为客户提供了二种适应的用户操作界面,较好地满足了网络应用程序中,多用户
各自对界面的不同使用习惯。参考文献
[1]刘山,赵辉.Delphi系统开发实例精释.北京;人民邮电出版社,2005,165-252[2]王志伟,黄超.Deiphi企业经营管理系统
Digital technology and application
工作,允许RAM、定时器/计数器、审口、中断继续工作,掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬件复位为止。显示部分共32个高亮LED,灌电流条件下通过74HC5 95驱动模块直接驱动。为了保持供电稳定,电源两端需井连一个大电容。
3.2能机控制模块
能机是・种位置伺股的驱动器,在机器人系统中可提供和保持精确的角度控制2 其工作原理是:控制信号由接收机的通道进人信号调制芯片,获得直流偏置电压。它内部有二个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动,
基于AVR单片机的能机控制具有精度高连接简单,系统可靠性强等特点。用AT mega32单片机作为SR-403P能机的控制单元.使PWM信号的脉冲宽度实现微秒级的变化,从而提高能机的转角精度。
4软件设计
本系统的软件用C语言编写,主程序完成系统硬件的初始化,子程序调用等功能。主程序、动作子程序如图2.图3所示。
5结语
实践证明,本文所设计的舞蹈机器人运行稳定、动作优美、能够很好的完成一些高难度舞蹈动作,通过改进机器人机械结构,结合专用调试软件即可达到机器人模仿章
鱼动作的预期目标。参考文献
[1]刘广瑞.机器人创新制作[M].西安;西北
工业大学出版社,2007
[2]陈继荣.智能电子创新制作一机器人制作人门[M].北京:科学出版社,2007
开发实例导航.北京:人民邮电出版社,2 003.
作者简介:彭其华(1969一),勇,自黄人,研究业,讲师,主要研究方向款件体系与件开发。主导及参与多项实降应用项目的设计与开复,
上一章:基于动态窗口的足球机器人搜索算法研究
下一章:基于ARM及蓝牙技术的智能搬运机器人