您当前的位置:首页>论文资料>基于全局优化的磨矿PID控制器研究
内容简介
 数事载本与率用
数事载本与率用基于全局优化的磨矿PID控制器研究
张亚如陈志凤
(廊坊师范学院,河北席坊065000)
数控技术
摘要:在磨矿过程中需要用到大量的PID控制器,本文理论深入研究全局优化改进算法并结合PID控制器,形成了全局优化PID控制器。 MATLAB仿真结果表明智能PID控制器效果良好,移定性强,
关键词:全局优化;线性松弛;PID控制;意矿过程
中图分类号:TP273 1引言
文献标识码:A
智能PID控制器是利用智能算法,将控制策略应用到执行器的种新型控制器。如果将被控对象替换为被优化目标函数,系统的给定值设定为一个足够小的值,那么在一定的控制策略下被优化目标函数的函数值将会不断通近给定值直至达到其全局最小值。这就是全局优化PID算法。将算法应用在PID控制器中,能够有效的提
高整定参数调整效率,并且应用在磨矿过程中4。 2基于线性松弛的全局优化算法
目前,全局优化算法针对最优化问题的数值解法,大多只能求解得到间问题的局部最优解,但在实际工程中大多需要全局最优解,比如磨矿过程中的控制。而实际问题的最优化模型都是存在多个局部最优解,这就使得一此经典的数值解法无法求得间题的全局最优解。因此,需发展全局优化算法去求解这类问题。本文采用的是基于线性松驰的改进全局优化算法,主要先通过下述方法建立原广义几何规划间题的一个线性松弛规划2。
广义几何规划间题的线性松弛规划,首先利用指数变换,令 x,=e"(i=1,,n),将间题转化为下面的最优化间题:
min y(y)
GGP(0):
w(y)≤, j=,-., m s.t.
yeQ= (y: Inx, =y, ≤ y, ≤ y' = Inx,
GGP(Q)的松弛线性规划可以通过一下方法来构造: maxmyimyrj,Yl-minyl,ny 合Y"
开始
线性检验规划造代算法 PID参数期望值
执行值编益计算系统阶联响应
图1程序流程图
收稿日期:2017-09-08
文章编号:1007-9416(2017)09-0009-01 Y, Z/ny*, C,(o)=L,(. =0, m 松慰线性规划:
min C, (y)
RLP(Q):
C,(y)≤1, j =1,-,m,
s-t.
yeQ=(y: Inx, =, ≤y, Sy"=Inx
3PID控制器算法模型实验及应用
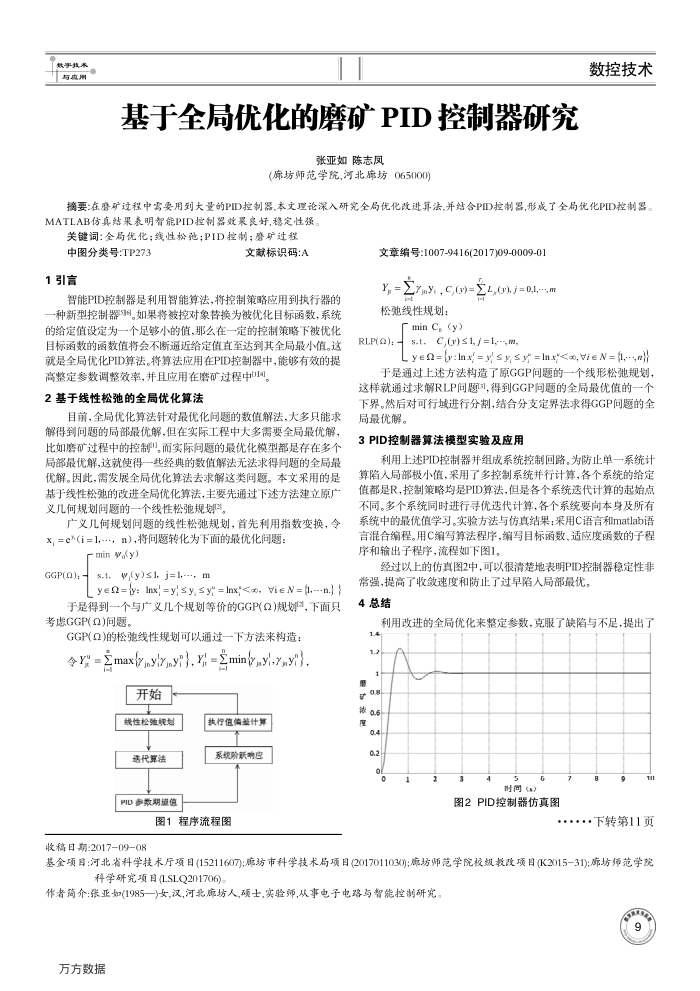
利用上述PID控制器并组成系统控制回路。为防止单一系统计算陷入局部极小值,采用了多控制系统并行计算,各个系统的给定值都是R,控制策略均是PID算法,但是各个系统送代计算的起始点不同。多个系统同时进行寻优选代计算,各个系统要向本身及所有系统中的最优值学习。实验方法与仿真结果:采用C语言和matlab语言混合编程。用C编写算法程序,编写目标函数、适应度函数的子程序和输出子程序,流程如下图1。
经过以上的仿真图2中,可以很清楚地表明PID控制器稳定性非
常强,提高了收敛速度和防止了过早陷人局部最优。 4总结
利用改进的全局优化来整定参数,克服了缺陷与不足,提出了
矿#0.6 座 0.4
o
时间(s)
图2PID控制器仿真图
.・下转第11页
基金项目:河北省科学技术厅项目(15211607):廊坊市科学技术局项目(2017011030):廊坊师范学院校级教改项目(K2015-31);廊坊师范学院
科学研究项目(LSLQ201706)。
作者简介:张亚如(1985一)女,汉,河北廊坊人,硕士,实验师,从事电子电路与智能控制研究万方数据