您当前的位置:首页>论文资料>基于自适应模糊PID无刷直流电机控制研究
内容简介
 数事其术与表用
数事其术与表用应用研究
基于自适应模糊PID无刷直流电机控制研究
王淳玉
(唐钢气体有限公司河北唐山063000))
摘要:本文通过对无剧直流电机的工作原理进行分析,将自适应模期整定PID方法与其相结合,建立了计算机仿真数学模型,研究其稳定性、控制精度以及动态响应速度
关键调:无剧直流电机自适应模糊PID控制
中图分类号:TP273.4
文献标识码:A
文章编号:1007-9416(2014)03-0095-01
无刷直流电机所用的是电子式换向器,其不仅具有直流电机的调整性能,面且还解决了有剧直流电机换向的各种间题,具有高精度、无磨损、体积小、空载电流低等高性能优点。因此,无制直流电机逐步在多个领域得到了应用,如医疗器械、家电、化工等。不过无剧直流电机的精度与稳定性的调控还需要进一步的提高
PID控制技术的发展较早,其结构相比简单,具有高稳定性,可靠性的特点,在工业控制中得到广泛的采用。对PID控制的控制需要建立在严格的调制控制器的参数基础上,确保参数发生变化后, PID控制器参数不会因被控对象而发生变化。无剧直流电机的调速模型具有复杂的特性,通过其来确定PID的控制参数非常困难。模糊控制具有良好的强壮性和优质的控制性能,其对非线性复杂对象的控制相对更高,不过因为其不存在积分环节,所以控制系统有定的控制盲区,导致稳定性和精密度相对较差。模糊控制PID控制
以其较强的强壮性脱颖而出。 1无刷直流电机的工作原理
无刷直流电机是机电一体化产品,主要是由电机、换相电路和传感器构成。本文基于全桥逆变器,在工作方式上选取上桥臂PWM 控制、下桥肾恒通。建立无刷直流电机的动态方程如下:
d
U= Ri + L Te= Kil
+E
7.-7 = Jdn
(a)(b)
(c)
在动态方程式中,L,RIL、U,E,T_,K,J、T,分别代表的是绕线电感、绕线电阻、定子相电流、设定参考电压、额定励磁下电机反电动势、转矩力、转矩系数、电机转动惯量、负载转矩。根据以上三个方
U(8) E(2) = Ls+ R(d)
程,得到的无直流电机传递函数是:
la(s)
2无刷直流电机自适应PID控制系统仿真模型
2.1控制策略
根据以上的动态方程b可以得知,无刷直流电机的转矩力与相电流成正比。在整个控制系统中,安置两个调节器来控制转速与电流,以便可以使转速和电流的负反馈达到最佳状态。无剧直流电机控制系统所采用的是电流内环、转速外环的双闭环控制,如图1。
在无剧直流电机调整系统中,转速环能够有效的降低负载变化对整个系统性能的负作用,约束转速变化PID控制器不能按照被控对象的参数变化而进行自动的适当的调节,强壮性能较差,模糊控制器可以随被控制对象的自应调节十分突出,强壮性能优越,不过稳定性和精密度不高。因此,本次在无剧直流电机控制系统中选择自适应PID控制器作为转速调节器。结构如图2.
在控制结构图中,X是速度误差信息,X是误差变化信息;4 kg..分别是PID参数模棚护理形成的模糊集论域幅值,ks.a.1.,为
328
图1无刷直流电机双闭环系统控制策略
比值。
2.2模糊PID控制器的构建
确定模糊控制规则一定要建立在系统的系统的最佳状态基础上。其参数整定原则如下。
(1)如果出现偏差α略大的时候,无论X。怎样,都取略大的k 和k,达到以最短时间内降低偏差。如果XX_大于0,就选择略小的 k,或者是k,等于0;如果XX。小于0时,就选择略大的k,达到避免偏差进一步加深的。
(2)如果偏差刘较为适中,就需要注意避免系统超调量过大,应该选择略小的k_和相对适当的k。如果XX。小于0,应该选择略大的 k。如果XX.大于0,就应该选择中等程度值,用来避免偏差增大。
(3)如果偏差双略小,或者为0时,可以尽量减少系统的调节时间,选择相对适中的k,以及略小的k。如果X,X小于0,就选择略小的k,如果X,X大于0,那么k,应该适中,尽量不能过大,以便降低系
统对振落的敏感性,缩短调节时间。 3仿真结果
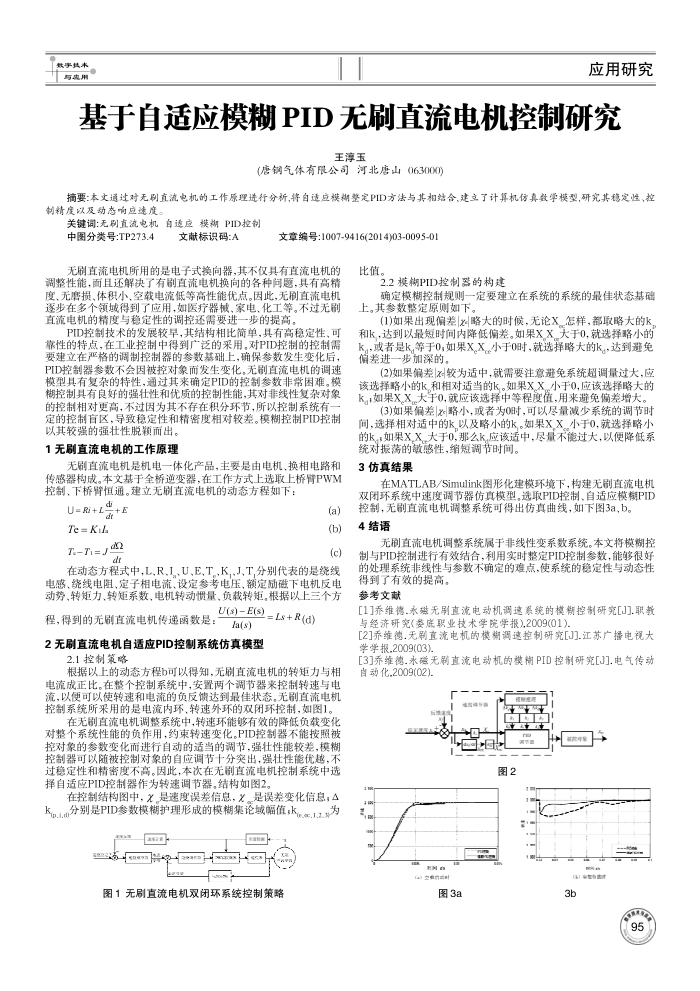
在MATLAB/Simulink图形化建模环境下,构建无剧直流电机双闭环系统中速度调节器仿真模型。选取PID控制、自适应模榭PID
控制,无剧直流电机调整系统可得出仿真曲线,如下图3a,b。 4结语
无刷直流电机调整系统属于非线性变系数系统。本文将模翻控制与PID控制进行有效结合,利用实时整定PID控制参数,能够很好的处理系统非线性与参数不确定的难点,使系统的稳定性与动态性
得到了有效的提高。参考文献
[1]乔维德.永磁无别直流电动机调速系统的模翻控制研究[]].职教与经济研究(委底职业技术学院学报),2009(01)
[2]乔维德.无刷直流电机的模糊调速控制研究[J].江苏广播电视大学学报.2009(03)
[3]乔维德.永磁无刷直流电动机的模糊PID控制研究[J].电气传动自动化.2009(02)
不图2
n a)e
图3a
() *thtt 3b
上一章:基于网管系统的数据管理模式设计
下一章:基于智慧超市的自主微型购物系统的设计