对于房屋太阳能自动加热系统温控模糊自调PID串行控制算法的研究
内容简介
 ,应用研究:
,应用研究:数字技术与应用
对于房屋太阳能自动加热系统温控模糊自调PID串行控制算法的研究
戴江涛
(兰州交通大学
统
邸媚
甘肃兰州
730070)
要1对于房展自动加热系统的温度控制,由于其具有时滞、时变和模型的不确定性,模期自适应PID串行控制算法更加具有
优势。这种算法利用串行控制算法,克服了控制参数的动态性,从面达到史好的控制效果,通过仿可以发现,该算法优于传统PID 控制,具有更好的动态跟踪、更低的超调量和更强的抗于扰能力。
[关键词]温度
自动加热太阳房
[中图分类号]TM205
极频
串联算法
[文款标识码]A
1介绍
主动式太阳房果暖系统通过太闭能集热器收集太阳能,通过收热器释放热量。目前,水被视为是敏有效的介质,太阳能集焙器安放在星项,由循环泵,储热器,变频加热泵,辅助加热系统和散热器等构成。热水由变频泵输送轻散热器,加热整个房星后,然后返同到储热器底部实现再利用。在阳光不足的阴雨天或者晚上,辅助加热系统会启动,并入主动式太阳房供暖系统,保证供暖和生活用水。房量内部温度会保持在最适宜的状态,不仪使人们感到舒适,面且也能有效地利用太阳能。经算,-100m的房屏面积,温度升高「,大概需要73760KJ的热量,所以保持温度恒定对于节省能源是非常重要的,
2模糊自整定PID串级控制(FS-PIDC)算法的设计
2.1FS-PIDC的结构设计
审级控制系统的设计主要是参数的选择,副回路设计和主,副回路之间的关系。主回路的参数有较长的时间延迟,主控制器根据设定加热溢度计算子回路的给定值。子同路具有较小的时间延迟,它可以在水压或者加热温度影响主回路的设定加热温度前克服干扰,从面提高控制精度。模糊控制器能够自动实时调整控制参数。
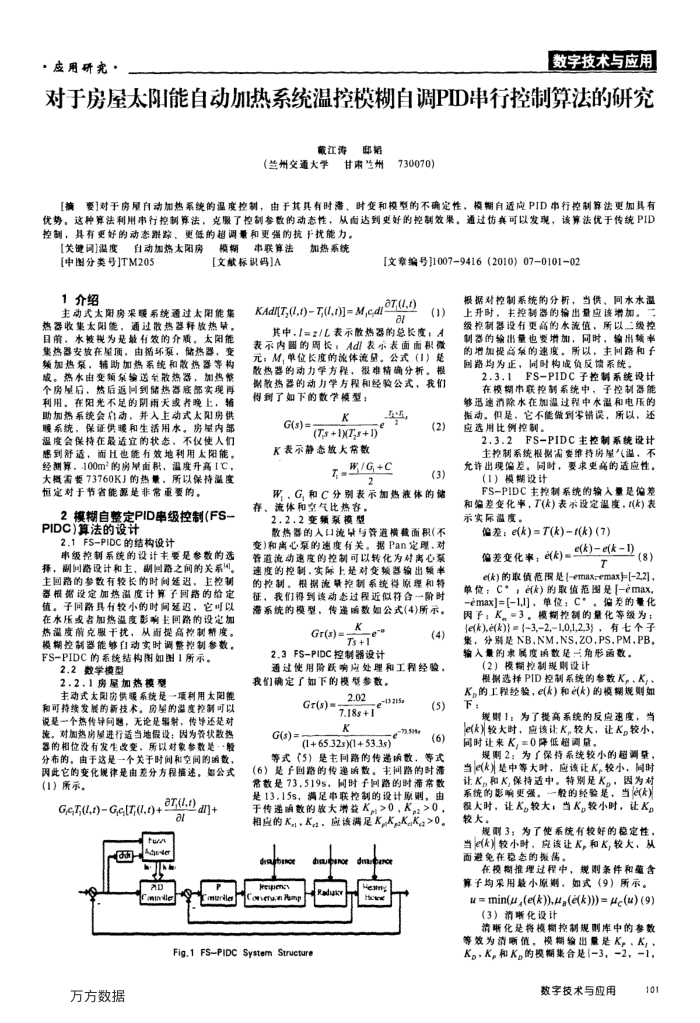
FS-PIDC的系统结构图如图1所示。 2.2数学模型
2.2.1房屋加热模型
主动式太阳房供暖系统是一项利用太阳能和可持续发展的新技术。房星的温度控制可以说是一个热传导间题,无论是辐射,传导还是对流。对加热房量进行适当地假设:因为管状散热器的相位没有发生改变,所以对象参数是-・般分布的。由于这是一个关于时间和空间的函数,因此它的变化规律是由差分方程推述,如公式(1)所承,
a(,t)
GT,(,t)G,c[,(I,t)+
dn+ al
tua Adede
AD
加热系统
[文章编号]10079416(2010)07010102
at(u,t)
KAd[T,(I,r) T,(,r)]= M,c,dl
a
(1)
其中,1=2/L表示散热器的总长度;A 表示内圈的周长:Ad表小表面面积微元:M,单位长度的流体流量。公式(1)是散热器的动力学方程,很难精确分析。根影散热器的动力学方程和经验公式,我们得到了如下的数学模型:
・五
G(s) =
K
(T,s +1T,s +1)
K表示静态放大常数
Z-里/G+C
(2)(3)
2
W,.G,和C分别表示加热液体的储
流体和空气比热容。存,
2.2.2变频泵模型
散热器的人口流量与管道横截面积(不变)和离心泵的速度有关。据Pan定理.对管道流动速度的控制可以转化为对离心系速度的控制.实际上是对变频器输出频率的控制。根据流景控制系统得原理和特征,我们得到该动态过程近似符合一阶时滞系统的模型,传递函数如公式(4)所示。
Gr(s)=
K Ts +!
(4)
2.3FS-PIDC控制器设计
通过使用阶跃响应处理和工程经验,我们确定了如下的模型参数。
2.02
-13215
Gr(s)=
7.185+ K
G(s)=
(1+ 65.32s)(1+ 53.3s)
73.519
(5)(6)
等式(5)是主同路的传递函数,等式(6)是于回路的传递函数。主间路的时滞常数是73.519s,同时于同路的时滞常数是13.15s,满足审联控制的设计原则,由于传递函数的放大增益K>0,K>0,相应的Ka,Ka,应该满足K,K,K,K。>0
drajbx CunRmn
daupunt diarbero Radukrh
kg
Fig.1 FS-PIDC System Structure
万方数据
根据对控制系统的分析,当供、同水水温上升时,主控制器的输出量应该增加。级控制器设有更高的水流值,所以二级控制器的输出量也要增加,同时,输出频率的增加提高条的速度,所以,主间路和于回路均为正,间时构成负反馈系统,
FS-PIDC子控制系统设计
2.3.1
在模糊联控制系统中,子控制器能够迅速消除水在加温过程中水温和电压的动。但是,它不能做到零错误,所以,还应选用比例控制。
2.3.2
FS-PIDC主控制系统设计
主控制系统根据需要维持房量温,不允许出现偏差。同时,要求更高的适应性。
(1)模糊设计
FS-PIDC主控制系统的输人量是偏差和编差变化率,T(k)表示设定温度,(k)表示实际温度。
偏差: e(k)= T(k)= (k) (7) 偏差变化率:(k)(k)-e(k-D)
(8)
e(k)的取值范围是(-emax-emax[-2,2] , 单位:C。;e(k)的取值范图是[-émax, émax]=[-1,]],单位:C*,偏差的量化因子;K。=3。模期控制的量化等级为: le(k),e(k))= (3,2,1,0,1,2,3) ,有七个子
分别是NB,NM.NS,ZO,PS.PM,PB,
果,
输入量的求属度函数是二角形函数。
(2)模糊控制规则设计
根据选择PID控制系统的参数K,.K,、 K、的工程经验,e(k)和e(k)的模期规则如下
规则1:为了提高系统的反应速度,当 e(k)较大时,应该让K,较大,让K较小,同时让来K,=0降低超调量。
规则2:为保持系统较小的超调量,当e(k)是中等大时,应该让K,较小,同时让K,和K,保持适中。特别是K。,因为对系统的影响更强。
一般的经验是,当(k)
额人时,让K。较大,当K。较小时,让K。较大
规则3:为了使系统有较好的稳定性,当e(k)较小时,应该让K,和K,较大,从面避免在稳态的搬荡。
在模糊推理过程中,规则条件和范含算子均采用最小原则、如式(9)所示。 = min(u,(e(k),μ,(e(k) = μc(u) (9)(3)消清晰化设计
消晰化是将模制控制规则库中的参数等效为清晰值。模糊输出量是K,、K,、 K。,K,和K的模棚集合是(-3,-2,=1
数字技术与应用
101