Smith预估器的模糊PID算法控制大棚温度的设计
内容简介
 ・144・
・144・科技论坛
Smith预估器的模糊PID算法控制大棚温度的设计
郝竹银常海军齐剑李峰阀杰
(安徽理工大学电气与信息工程学院,安徽淮南232001)
摘要:评详辑介绍了温室大棚内温度Smith-模糊PID控制算法的实现过程,具体阐述了模期控制器的设计过程。将Smith预估器与潮PID控制算法精确度高、稳定性好,有很强的应用前景。
关键词:Smith-模糊PID温宝大棚:MATLA日
1概述
目前,我国温室大棚面积是世界最大,但是技术和管理水平相对于一些发达国家还有一定的距离。温室大棚是通过改变环境固素来控制蔬菜的生长,使蔬菜不在受到季节的影响。固而对大棚内环境参数的控制是最主要的部分。而在各种因素中温度的控制是最重中之中。在温室大棚中影响的温度变化的固素有很多,如:光照强度、通风情况、人员走动、室内外温差等都能使温度发生变换
在工业控制中PID控制算法得到了广泛的应用,
表1模糊控制规则表
at 3mn
e
EPS,B
,86(8-,E 5u222
,
PSS
s
22
m2m
ps,zye-
S25U595585m9e58VEV4
2S
22
22s-myss/ms/s/8ys/ss/eIye
PID控制结构简单、鲁棒性强,但PID控制需要有明确的被控对象的模型,而在温室大拥中的温度受到很多因素的影响很难精确的估计出其模型,因此传统的PID控制对其控制效果很难满足要求"。模糊控制与 PID控制合理结合就能解决不能精确估计被控对象模型的间题。温度控制是典型的时滞间题,而Smith预估计控制在时滞方面能有效的补偿。基于此本文设计了一种Smith-模糊PID控制算法。
2温室控制系统设计
2.1温室系统的数学模型。我国温室大棚目前大部分采用的加热装置为蒸汽管道。影响温室内温度的变化是非常复杂的,它不仅跟室内外的温差、光照强度、蒸汽管道的散热效率、通风天窗的开度、强制通风的效率等等。为了降低复杂度等各方面考虑选定温室大棚的理想数学模型近似为一阶系统,由于温度控制为大时滞系统应加上延退滞后环节,(S)(IS)/ =(S)(1
(1)
2.2模糊控制器设计。该控制系统中的模糊控制器的作用是通过给定的温度值与检测的温度之差以及其变化率来控制PID控制器中的三个参数.所以模糊器的输人量为温差E和温差变化率Ee,输出量为PID 三个参数的修正量△Kp、△Ki、△Kd
根据农业大棚技术人员的实际操作经验将E.EC、△Kp、△Ki和 △Kd分别模糊化。E、Ee、△Kp和△Kd论域离散化为7个等级:1-3, 2,1,0,1,2,3;△Ki离散化为7个等级:103,0.2,0.1,0,0. 1.0.2.0.3。模糊子集都为:1负大,负中,负小,零,正小,正中,正大1。分别用NBNMNSZ.PS.PMPM表示负大,负中,负小零正小,正中.正大。 NB和PB都采用高斯型隶属度函数负中,负小,零.正小.正中都采用三角形的隶属度函数。采用ifAandBthenC的控制规则确定模期控制规则表。比例环节的作用是快速调节偏差,当偏差较大时增大KP 的值,反正减小。比例系数也不益太大,过大会使超调量增大,系统不稳定。积分环节的作用是调节稳态误差,积分是对误差的一个积累过程,误差较大时不益使用积分环节会出现饱和现象。微分环节主要作用体现在误差的变化率,具有超前的作用,选择适当的Kd不仅可以减少超调还可以缩短调节时间。控制规则表如表1所示。
2.3Smith-模糊PID控制设计。PID中的三个参数是由初始值加上模糊控制器的输出值得到,如公式2所示。
p = Kp0 + p
= Ki0 + Kd = Fd0 + Ad
图1控制系统仿真结果
大的数;然后采用不断试凑的方式调整Kp的值使系统出现等幅振荡,记录下此时的临界比例系数Kr和临界振荡周期Tr:最后根据公式3计算出积分累数和微分系数。「
p = 1. 7 A Ai = 1. 2hr / Tr
Ad = 0. 075 * Ar * Tr
(3)
Smith预估部分加在反馈环节中,是提前估计系统的动态响应,并由它来补偿。Smth预估部分的作用是减少延时作用。可以便系统各方面的性能都有所改善。Smith预估器与模糊PID部分并接。
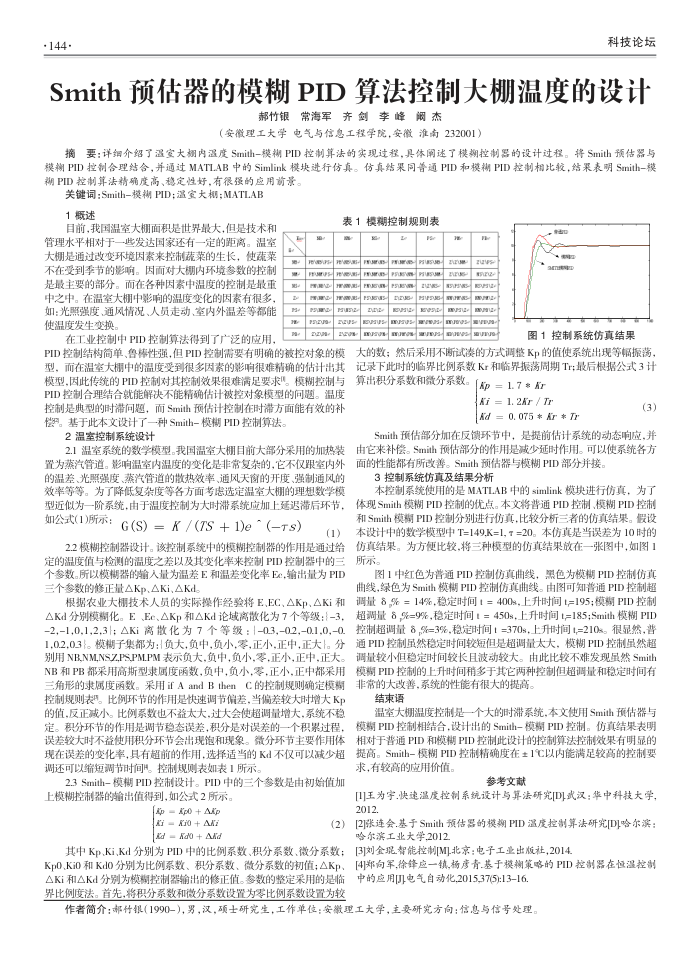
3控制系统仿真及结果分析
本控制系统使用的是MATLAB中的simlink模块进行伤真,为了体现Smith模糊PID控制的优点。本文将普通PID控制模糊PID控制和Smith模期PID控制分别进行伤真,比较分析三者的仿真结果。假设本设计中的数学模型中T=149.K=1.T=20。本仿真是当误差为10时的仿真结果。为方便比较将三种模型的仿真结果放在一张图中,如图1 所示。
图1中红色为普通PID控制仿真曲线,黑色为模糊PID控制仿真曲线,绿色为Smith模糊PID控制伤真曲线。由图可知普通PID控制超调量8%=14%,稳定时间1=400%,上升时间t=195;模期PID控制超调量8%=9%,稳定时间1=450s,上升时间t=185;Smith模棚PID 控制超调量8%=3%,稳定时间1=370s,上升时间t=210%。很显然,普通PID控制虽然稳定时间较短但是超调量太大,模棚PID控制虽然超调量较小但稳定时间较长且波动较大。由此比较不难发现虽然Smith 模期PID控制的上升时间稍多于其它两种控制但超调量和稳定时间有非常的大改善,系统的性能有很大的提高。
结束语
温室大棚温度控制是一个大的时滞系统,本文使用Smith预估器与模期PID控制相结合,设计出的Smith-模PID控制。仿真结果表明相对于普通PID和模糊PID控制此设计的控制算法控制效果有明显的提高。Smith-模糊PID控制精确度在±1C以内能满足较高的控制要求,有较高的应用价值,
参考文献
[I]王为宇.快建温度控制系统设计与算法研究[DI武汉:华中科技大学, 2012.
(2)
[2]张连会.基于Smith预估器的模期PID温度控制算法研究[DI哈尔滨:哈尔滨工业大学2012
其中Kp,Ki,Kd分别为PID中的比例系数、积分系数、微分系数; Kp0、Ki0和KdO分别为比例系数、积分系数、微分系数的初值;△Kp、 △Ki和△Kd分别为模期控制器输出的修正值。参数的整定采用的是临界比例度法。首先,将积分系数和微分系数设置为零比例系数设置为较
[3]刘金呢智能控制M]北京:电子工业出版社,2014
[4]郑向军,徐锋应一镇,杨彦青.基于模棚策略的PID控制器在恒温控制中的应用电气自动化,2015,37(5):13-16
作者简介:部竹银(1990-),男,汉,顾士研究生,工作单使:安缴理工大学,主要研究方向:信息与信号处理,