基于改进的遗传算法的伺服电机模糊PID控制器设计
内容简介
 精密制造与自动化
精密制造与自动化制造业信息化
2016年第4期
基于改进的遗传算法的伺服电机模糊PID
控制器设计
杨洪坤任德均孙勇威翟少斌
(四川大学制造科学与工程学院成都610065)
摘要针对何服电机采用PID控制的参数整定困难间邀,将模棚理论和PID控制相结合设计出模棚PID控制器并通过改进的遗传算法对模糊控制器的表属函数和控制规则同时进行优化,利用MATLAB进行仿真。结果表明,
基于改进遗传算法的模棚PID控制器,具有良好的动静态性能,且响应速度快、超调量小。关键词遗传算法伺服电机模糊控制PID
目前交流伺服系统广泛应用于传动控制"。虽然各种先进控制方法不断涌现,但在伺服系统的控制中,PID控制器由于其结构简单,稳定性好,控制精度高,因而在工业过程控制中有着非常广泛的应用。但是传统PID控制器的参数整定方法复杂,经常因为参数整定不良而导致性能不好。模糊控制不需要被控对象的数学模型,构造容易,具有良好的善释性和适应性,可以很好的满定非线性、时变耦合及参数和结构不确定的复杂过程"控制要求。采用模糊推理方法对PID参数K、K,和K进行在线自整定,能提高控制精度,具有更好的灵活性。但是由于模糊控制的隶属函数和控制规则是根据现场操作人员或专家的经验总结出来的,其有很大的主观性4],因此需要对模糊控制的隶属函数和控制规则进行优化。
遗传算法是一种全局优化概率搜索方法,模拟了生物在自然环境下进行遗传的过程。但是遗传算法存在局部搜索能力差的问题,因而在搜索的后期效率低,容易产生未成熟收敛,需对遗传算法进行改进。将改进后的遗传算法应用于模糊控制器的隶属函数和控制规则.的优化,以进一步提高模糊
PID控制器的系统性能。 1模糊PID控制器设计 1.1模糊PID控制器模型
模糊PID控制器以误差e和误差变化ec作为输 38
万方数据
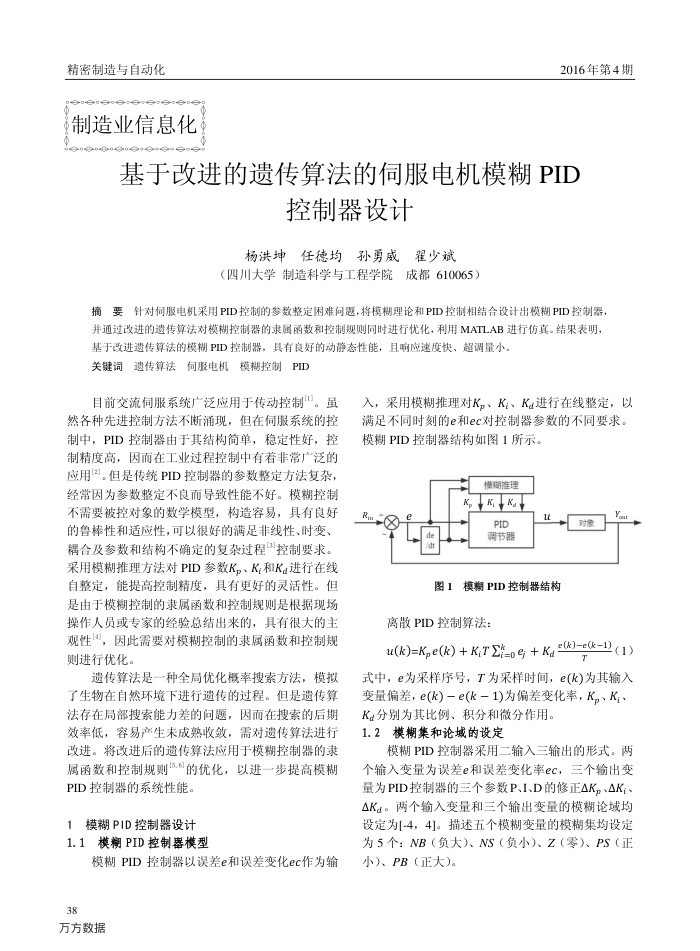
入,采用模糊推理对Kp、K;、Ka进行在线整定,以满定不同时刻的e和ec对控制器菱数的不同要求。模糊PID控制器结构如图1所示
模期推理 +x+ty
Ra网
de/dt
PID 调节器
图1模糊PID控制器结构
离散PID控制算法:
((-(+ a+(a=(n 式中,e为采样序号,T为采样时间,e(k)为其输入变量偏差,e(k)e(k-1)为偏差变化率,K、K,、
K。分别为其比例、积分和微分作用。 1.2模榭集和论域的设定
模糊PID控制器采用二输入三输出的形式。两个输入变量为误差e和误差变化率ec,三个输出变量为PID控制器的三个参数P、I、D的修正4K,、△K; 4K。。两个输入变量和三个输出变量的模糊论域均设定为[-4,4]。描述五个模糊变量的模糊集均设定为5个:NB(负大)、NS(负小)、Z()、PS(正小)、PB(正大)。
上一章:一种特殊钛合金零件的加工
下一章:基于VERICUT的虚拟数控机床建模方法研究