您当前的位置:首页>论文资料>机械手PLC控制设计
内容简介
 数事载本与度用
数事载本与度用机械手PLC控制设计
唐少臣韩屹威毛行星
(天津市第五机床厂,天津300000)
数控技术
摘要:基于PLC控制的机械手具有显等的优点,已经成为工业自动化生产的不可缺少的关键技术。本文通过借鉴传统机械手的设计方案,对适用于工厂般件截运的机械手PLC控制系统进行了相关模拟仿真和设计。在对机械手液压机构进行了深入的分析的基础上,认为机械手的设计需要考虑回转原点、点动控制和自动化控制三个因素;然后对适合机械手的PLC控制器、压力和位移传感器进行了相关技术参数选择,同时还对整体程序的设计进行了相关阐述,希望能够给以后的机械手PLC控制系统设计提供借鉴意义。
关键词:PLC;机械手:控制
中图分类号:TP241
文献标识码:A
随着工业机械手的广泛应用,其已经成为自动化控制领域的重要技术,在制造业不断发展的今天,机概手一方面可以代替人工进行生产线的作业,另外一方面机械手可以按照实际生产工艺的要求,按照一定的时间和程序设置来完成工作的卸载和传送。机械手的广泛应用可以大大的提高劳动生产率,加快我国制造业的转型与升级。如果机械手采用传统的继电器进行控制,则会直接造成系统原件比较紧杂、稳定性差以及出现故障概率高的特点。随着PLC技术的广泛应用,通过使用PLC来设计机械手的控制系统,可以保证较高的可靠性和较低的故障率,使用起来也相对简单。本文通过采用可编程控制器PLC来实现机械手的控制系统设计,使得控制过程精确
可靠,使得在实际生产过程中变得明确和清晰。 1机械手机构的液压系统分析
本文的机械手设计案例以锻造车间的机械手为例,该机械手处在高温的操作环境之中,机械手所要实现的功能就是将高温的锻件棒材加持到锻造工位的传送带上。实现对棒料准确的搬运,替代人工操作,改善工作环境。机械手的液压系统主要包括了液压驱动、手臂的升降和收缩等系统,再加上液压马达,液压换向回路使用三位四通阅进行控制。在机械手设计的过程中应该考虑以下几个方面的问同题:(1)锻件的重量较大,机械手应该具备较大的夹紧力。同时工件在移动的过程中还会出现较大的惯性,保证工件不会脱落。(2)机械手的手指应该具备一定的夹角,手指的开闭角直接影响着工件能否
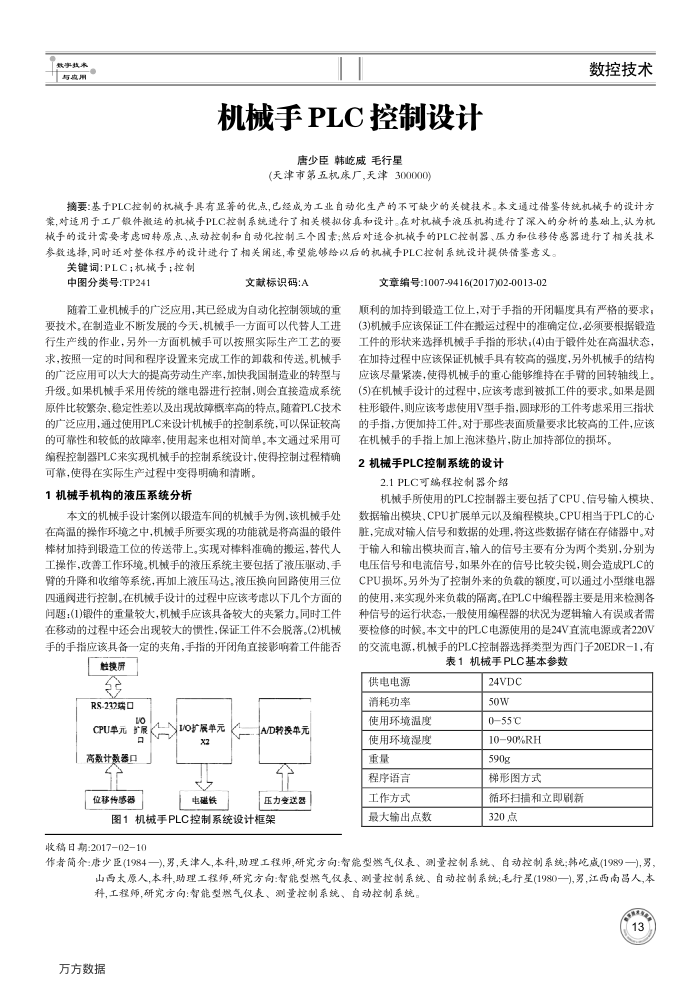
触换屏金 RS-232端
CPU单元
Vo 广展
高数计数器口茶位移传感器
yVO扩展单元
X2 电磁铁
A/D转换单元金压力变送器
图1机械手PLC控制系统设计框架
收稿日期:2017-02-10
文章编号:1007-9416(2017)02-0013-02
顺利的加持到锻造工位上,对于手指的开闭幅度具有严格的要求;(3)机概手应该保证工件在股运过程中的准确定位,必须要根据锻造工件的形状来选择机械手手指的形状;(4)由于锻件处在高温状态,在加持过程中应该保证机械手具有较高的强度,另外机械手的结构应该尽量紧凑,使得机械手的重心能够维持在手臂的回转轴线上。(5)在机械手设计的过程中,应该考感到被抓工件的要求。如果是圆柱形锻件,则应该考虑使用V型手指,圆球形的工件考虑采用三指状的手指,方使加持工件对于那此表面质量要求比较高的工件,应该
在机械手的手指上加上泡沫垫片,防止加持部位的损坏。 2机械手PLC控制系统的设计
2.1PLC可编程控制器介绍
机械手所使用的PLC控制器主要包括了CPU、信号输入模块、数据输出模块,CPU扩展单元以及缩程模块。CPU相当于PLC的心脏,完成对输人信号和数据的处理,将这些数据存储在存储器中。对于输人和输出模块而言,输人的信号主要有分为两个类别,分别为电压信号和电流信号,如果外在的信号比较尖锐,则会造成PLC的 CPU损坏。另外为了控制外来的负载的额度,可以通过小型继电器的使用,来实现外来负载的隔离。在PLC中编程器主要是用来检测各种信号的运行状态,一般使用编程器的状况为逻辑输人有误或者需要检修的时候。本文中的PLC电源使用的是24V直流电源或者220V 的交流电源,机械手的PLC控制器选择类型为西门子20EDR-1,有
表1机械手PLC基本参数
供电电源消耗功率
使用环境温度使用环境湿度重量
程序语言工作方式
最大输出点数
24VDC 50W 055℃
1090%RH 590g
梯形图方式
循环扫描和立即剧新 320点
作者简介:唐少臣(1984一),男,天津人,本科,助理工程师,研究方向:智能型燃气仪表、测量控制系统、自动控制系统;韩吃威(1989一),男,
山西太原人,本科,助理工程师,研究方向:智能型照气仪表、测量控制系统、自动控制系统:毛行星(1980)一),男,江西南昌人本科,工程师,研究方向:智能型燃气仪表、测量控制系统、自动控制系统。
万方数据
上一章:论PLC的日常维护、故障检查与处理措施
下一章:柔性生产线加工站的PLC程序设计