您当前的位置:首页>论文资料>基于西门子PLC的移置机械手控制系统
内容简介
 数学执本与变用
数学执本与变用数控技术
基于西门子PLC的移置机械手控制系统
陆伟
(无职业技术学院江苏无锡214121)
摘要:介绍了基于西门子PLC的移置机越手控制系统,提出了系统的工艺流程及控制要求,介绍了系统的组、原理以及PLC的选型及资源配置,同时也给出了PLC程序的流程图、构成和相关设置。
关键词:西门子PLC机械手
中图分类号:TP241
文献标识码:A
文章编号:1007-9416(2014)03-0009-02
机械手是在机械化、自动化过程中发展起来的一种新型装置。它能模仿人手部分动作,按照预先设定的程序,轨迹或其他要求,实现抓取,搬运工件或操纵工具的机械化装置。
本文的移置机械手的设计,采取直角坐标式运动形式的机械手,液压驱动的方式,通过液压缸,阅,油泵,油箱等实现运动。同时采用PLC控制电磁换向阔,控制油缸的进油,从面控制机械手的直线移置运动,进面实现其自动化,具有提高生产效率,实现实时控制的意义。
移动置机械手由PLC控制系统、驱动系统、和执行机构三大部分组成。机械手X方向移动通过液压缸带动手臂的伸缩来实现,Z向的移动通过伸缩液压缸带动手臂的移动来实现,Y向的移动同样通
过液压缸带动移动来实现。 1控制系统硬件设计
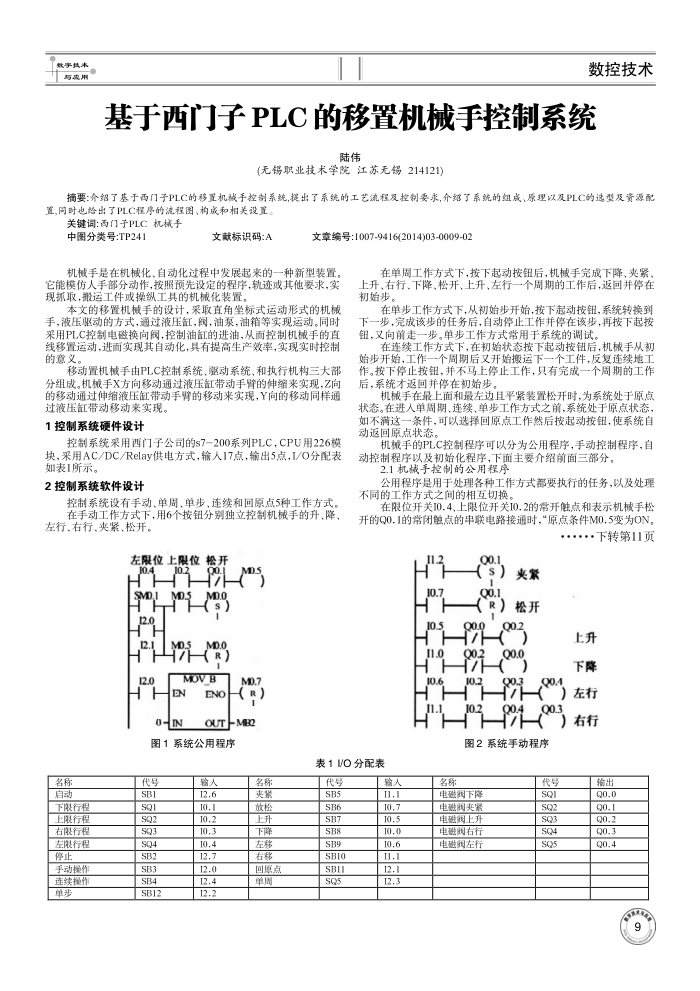
控制系统采用西门子公司的s7-200系列PLC,CPU用226模块,采用AC/DC/Relay供电方式,输人17点,输出5点,I/O分配表如表1所示。
2控制系统软件设计
控制系统设有手动、单周、单步、连续和回原点5种工作方式,在手动工作方式下,用6个按钮分别独立控制机械手的升、降
左行、右行、夹紧、松开。
左限位上限位松开
m
ML
Fng
MD.0
12.0[2.1
M0.5
DON
HHR)
MOVB
12.0
HEN
NFO
ENO
M0.7(R)
OUTEMB2
图1系统公用程序
在单周工作方式下,按下起动按钮后,机械手完成下降、夹紧、上升、右行、下降、松开、上升、左行一个周期的工作后,返回并停在初始步。
在单步工作方式下,从初始步开始,按下起动按钮,系统转换到下一步,完成该步的任务后,自动停止工作并停在该步,再按下起按钮,又向前走一步。单步工作方式常用于系统的调试,
在连续工作方式下,在初始状态按下起动按钮后,机械手从初始步开始,工作一个周期后又开始搬运下一个工件,反复连续地工作。按下停止按钮,并不马上停止工作,只有完成一个周期的工作后,系统才返回并停在初始步。
机械手在最上面和最左边且平紧装置松开时,为系统处于原点状态。在进人单周期、连续、单步工作方式之前,系统处于原点状态,如不满这一条件,可以选择回原点工作然后按起动按钮,使系统自动返回原点状态
机械手的PLC控制程序可以分为公用程序,手动控制程序,自动控制程序以及初始化程序,下面主要介绍前面三部分。
2.1机械手控制的公用程序
公用程序是用于处理各种工作方式都要执行的任务,以及处理不同的工作方式之间的相互切换,
在限位开关10.4.上限位开关10.2的常开触点和表示机械手松开的Q0.1的常闭触点的申联电路接通时,“原点条件M0.5变为ON。
..下转第11页
J11.2
Q0.1(s)
夹紧
10.7
Q0.1
松开
R) 8
Q0.2 1
n.1
表1/O分配表
名称启动
下限行程上限行程右限行程左限行程停止
手动操作连续操作单步
代号 SB1 SQI SQ2 SQ3 SQ4 SB2 SB3 SB4 SB12
输人 12.6 10.1 10.2 10.3 10.4 12.7 12.0 12.4 12.2
名称夹紫就检上升下降左移右移回原点单周
代号 SB5 SB6 SB7 SB8 SB9 SB10 SBII SQS
输人.1 10.7 10.5 10.0 10.6 11. 12.1 12.3
名称
102
上升下降)左行
Q0.3
)有行
图2系统手动程序
代号 SQI
电磁阀夹案电磁阀上升电磁阀右行电磁阀左行
SQ2 SQ3 SQ4 SQ5
输出 Q0.0 Q0.1 Q0.2 Q0.3 Q0.4