您当前的位置:首页>论文资料>步进式爬梯轮椅的设计
内容简介
 设计与制造
设计与制造doi ;10. 16576/j. cnki. 10074414. 2016. 06. 044
2016年第6期(第29卷,总第146期)・机械研究与应用
步进式爬梯轮椅的设计
张迪,朱增宝
(安微理工大学机械工程学院,安徽淮南232001)
摘要:设计了一种集平地行驶和上下楼功能相结合的步进式爬梯轮椅。该轮椅采用轮毅电机驱动轮椅平地行驶,通过轮椅伸缩杆电机的传动齿轮与伸缩杆内部的齿条相合带动伸缩杆伸缩部位做上升或下降运动的步进式方式上下楼梯。提出三对仲缩杆进行轮持爬升装置的设计,该伸缩杆用于模仿人类上下楼梯过程,通过这三对伸缩杆在电机控制下有规律的运动实现轮持的上下楼功能。最后运用simulation对轮椅的底座进行有限元分析,确保轮在使用过程中的安全性与稳定性
关键词:爬梯轮椅;步进式;伸缩杆;有限元
中图分类号:TH122
文献标志码:A
文章编号:10074414(2016)06-0142-02
Design for the Step Climbing Wheelchair
ZHANGDi,ZHU Zeng-bao
( School of Mechanical Engineering, Anhui Uninersity of Science and Technology, Huainan Anhui 23200I, China)
Abstract : In this paper, a kind of step climbing stair wheelchair which combines the functions of flat driving and up and down stairs is designed. The wheelchair is driven to travel on the flat ground with the wheel hub motor, while go up and down the stairs in step way through meshing the drive gear of wheelchair telescopic rod motor and the internal racks of telescopic rods to-gether to drive the telescopic parts of the telescopic rods do rising or falling movement. Three pairs of telescopic rods are used in designing the climbing device of wheelchair to imitate the process of human walking up and down stairs, thus the funtion of climbing up and down stairs of the wheelchair could be realized through regular movement of the telescopic rods under the mo ansa o se os uoens a n paanpuoa s aea o aseg jo e uaaa ag ae ooa o the safety and stability of wheelchair during use.
Key words : stair climbing wheelchair; stepping; telescopic pole; finite element
引言 0
步进式爬梯轮椅作为一种新型爬梯轮椅,其工作机构的重点问题在于爬升装置的设计和如何将上下楼功能与平地行驶相结合1。按照结构形式来划分,轮椅爬升装置可以分为行星轮式、履带式、腿足式以及它们的复合结构等[2]。行星轮结构虽然能够完
成爬楼运动,但爬楼过程中轮椅本体的来回波动会降低乘坐的舒适度;履带式结构接触楼梯面积比较大,安全性较高但运动过程相对不是很便利;腿足式结构采用一组或儿组腿交替升降、支撑爬楼的原理,对楼梯的适应性很强但是其承载重心偏高[3]。笔者通过对以上爬升装置的综合分析,考虑到使用的安全性、运动的灵活性等方面因素[4],最终决定采用步进式的方式上下楼梯。
1爬梯轮椅总体设计 1.1爬梯轮椅工作原理
设计的步进式爬梯轮椅结构示意图如图1所示。*收稿日期:2016-11-07
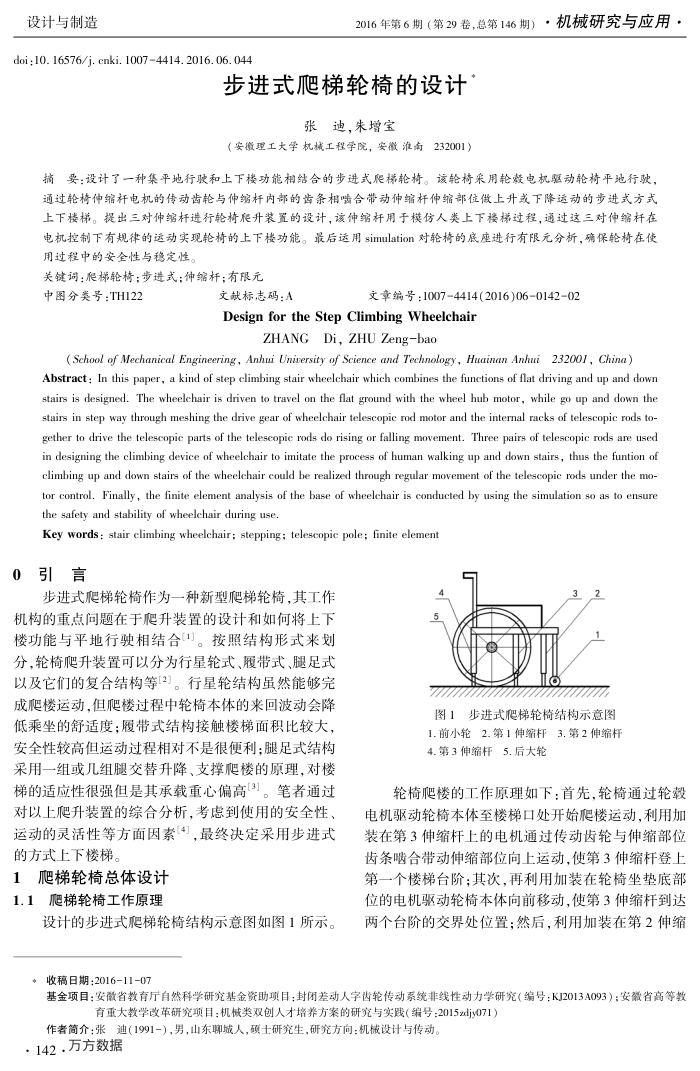
图1步进式爬梯轮椅结构示意图 1.前小轮2.第1伸缩杆3.第2伸缩杆 4.第3伸缩杆5.后大轮
轮椅爬楼的工作原理如下:首先,轮椅通过轮毂电机驱动轮椅本体至楼梯口处开始爬楼运动,利用加装在第3伸缩杆上的电机通过传动齿轮与伸缩部位齿条啮合带动伸缩部位向上运动,使第3伸缩杆登上第一个楼梯台阶;其次,再利用加装在轮椅坐垫底部位的电机驱动轮椅本体向前移动,使第3伸缩杆到达两个台阶的交界处位置;然后,利用加装在第2伸缩
基金项目:安微省教育厅自然科学研究基金资助项目:封闭差动人字齿轮传动系统非线性动力学研究(编号:KJ2013A093);安徽省高等教
育重大教学改革研究项目:机械类双创人才培养方案的研究与实践(编号:20152djy071)
作者简介:张迪(1991-),男,山东聊城人,硕士研究生,研究方向:机械设计与传动。・142.万方数据