����ǰ��λ�ã���ҳ>��������>����PLC�IJ����������ϵͳ���
����PLC�IJ����������ϵͳ���
���ݼ��
 ���ּ�����Ӧ��
���ּ�����Ӧ������PLC�IJ����������ϵͳ���
������
��������
(�������ʹ���ְҵѧԺ
118008)
�������
Ҫ]���¸��ݴ�ͳ������������еIJ����ȱ�㣬��PLCֱ�ӿ��Ƽ��������ڲ�������Ŀ��ơ���ϵͳ����˴�ͳ���Ƽ�
���еĸ�����Ӳ������ơ�ѡ�͡��ӿ�ƥ������Ҫ���������һ�ܴ�ľ������Ͷ����ӿ��źŵ�ƥ���Լ��������������ȶ�����ϵͳ�Ŀ�ܰ��Ӱ��ܴ��ȱ�㡣����PLC���Ʋ�������Ŀ����ص㼰��ԭ�������������ƺ�Ӳ����·�������������γ�����Ŀ��ƣ���Ч�Ŀ˷������ǵ�ȱ���淢�������ǵ����ơ�������ϸ���˸�ϵͳ��PLC�������ӣ�ֱ�ӿ��Ʋ��������ʵ�ַ�����ϵͳ�ĸ���������ɡ������������������
���ؼ���]�ɱ�̿�����[��ͼ�����]TP
�������
�Զ�����[���ױ�ʶ��]A
#
�����綯���ǽ����������źű任�ɽ�λ�ƻ�ֱ��λ�Ƶ�һ������綯����������������ܺá����пɿ������᳤���ۻ������������ּӹ��豸���Զ������ߡ��Զ������DZ�����������칫�Զ����豸�������õ����С�Ϊ��ʵ�ֲ�������ļ����˶����ƣ�һ�����PLC��������������������ʵ�ֲ���������ٶȺ�λ�ö�λ���ƣ�
ϵͳҪ�� 1
��ʵ�����ϵͳ�ɳ����о������ܵ����˾������PM25S-024-11������ʽ���������������S7-200ϵ��CPU226CN��
����
���� 10.0
[���±��]10079416��2010��020020-02
PLC���ư�ť�����ص���ɡ�ϵͳҪ����ת����ת���ؿ��Կ��Ʋ������������ת���ֱ�ѡ���ٶȵ�λN1��N2��N3����������ֹͣ������Ϊ��������ʱ������Բ�ͬ�ٶ����У�ѡ��S���������ֶ�������ʽ����������ֹͣ���،�Ϊ���Զ���ʱ��ÿ��һ�µ�����ť�������һ����
ϵͳӲ�� 2
��ϵͳ������������������������������ɡ�Ӳ����·��Ϊ��
���������һ�ֽ�������ת��Ϊ��λ�Ƶ�ִ�л�������PLC����һ�������źŵ�װ���������;۶�����������趨�ķ���ת��һ���̶��ĽǶ�(��Ϊ�������")��
���������1/O�����
���
����ת��ť
10.1/10. 2/10. 3
10.5 10.6 11.0
��·8
n.0 c5
Q1.0A��
�ٶ�3��/2��/1��Q1.1B��
�ֶ���ť
����/ֹͣ����������ť
�������
10.5
10.1 s y 10.3
����13
11.0 H
n.o HH
10.0 oom H
20
����ļ����Ӧ�÷�������
10.0 10.0 H C1 �� C4
Q1.2C�� Q1.3D��
10.6
10.6 HH
T39 H
C2
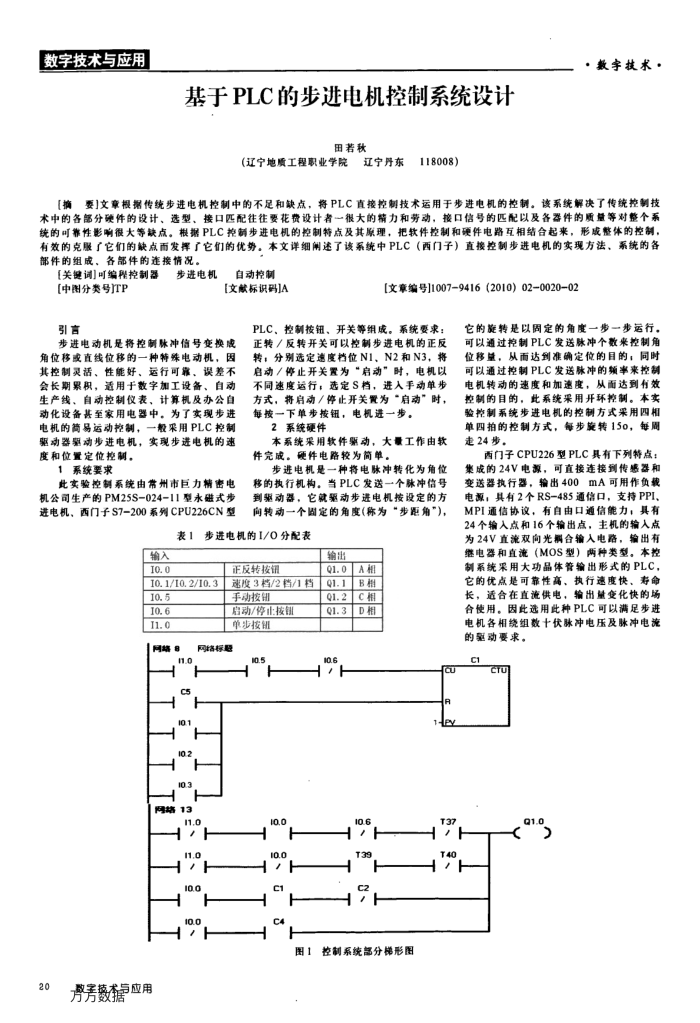
����ϵͳ��������ͼͼ��
u
������ת�����ܶ��ĽǶ�һ��һ�����У�����ͨ������PLC����������������ƽ�λ�������Ӷ��ﵽȷ��λ��Ŀ�ģ�ͬʱ����ͨ������PLC���������Ƶ�������Ƶ��ת�����ٶȺͼ��ٶȣ�����ﵽ��Ч���Ƶ�Ŀ�ģ���ϵͳ���ÿ������ơ���ʵ�����ϵͳ��������Ŀ��Ʒ�ʽ����������ĵĿ��Ʒ�ʽ��ÿ����ת150��ÿ����24����
������CPU226��PLC���������ص㣺���ɵ�24V��Դ����ֱ�����ӵ��������ͱ�����ִ���������400mA���������ص�Դ������2��RS-485ͨ�ſڣ�֧��PPI�� MPIͨ��Э�飬�����ɿ�ͨ������������ 24��������16������㣬���������˵�Ϊ24Vֱ��˫�����������·������м̵�����ֱ����MOS�ͣ��������͡�������ϵͳ���ô�Ʒ���չ������ʽ��PLC�������ŵ��ǿɿ��Ըߡ�ִ���ٶȿ졢���������ʺ���ֱ�����磬������仯��ij���ʹ�á����ѡ�ô���PLC�������㲽���������������ʮ�������ѹ���������
������Ҫ�� C1
Q1.0
ZEA H T40 H/H