Delta并联机器人非线性工作空间下轨迹插补算法
内容简介
 第1期 2017年1月
第1期 2017年1月组合机床与自动化加工技术
ModularMachineTool&AutomaticManufacturingTechnique
文章编号:10012265(2017)01007404
D0I:10.13462/j.cnki.mmtamt.2017.01.020
No.1 Jan.2017
Delta并联机器人非线性工作空间下轨迹插补算法
陈梅,石文博
(合肥工业大学电气与自动化工程学院,合肥230009)
摘要:为了提高Delta并联机器人运动控制精度,对其工作空间内非线性分布和轨迹插补算法进行了研究。基于仅考虑算法误差前提下,提出了通过选择Delta并联机器人单步插补位置误差最小的精度最优算法。基于机器人运动性能指标下的快速性和精确性,分析对比机器人传统插补算法和精度最优算法各自性能指标,最后通过Matlab平台仿真测试了算法的可行性,结果表明精度最优控制算法在整个
机器人可达工作空间内都能有效提高机器人运动控制精度,控制效果要优于传统PVT控制方法。关键词:并联机器人;工作空间;轨迹规划;空间插补;误差控制
中图分类号:TH165;TG659
文献标识码:A
Trajectory Interpolation Algorithm for Delta Parallel Robot in Nonlinear Working Space
CHEN Mei , SHI Wen-bo
(School of Electrical and Automation Engineering, Hefei University of Technology, Hefei 230009, China) Abstract : In order to improve the accuracy of motion control of Delta parallel robot, the non-linear distribu-tion and path interpolation algorithm in its work space are studied. In only considering error of the algorithm premise, the precision optimal algorithm by choosing minimum error of single step interpolation position of Delta parallel robot is proposed. Based on the rapidity and accuracy under motion performance index of the robot, the performance index of the traditional interpolation algorithm and precision optimal algorithm is ana-lyzed and compared. Finally, the feasibility of the algorithm is tested through Matlab simulation platform, and the results show that the precision optimal control algorithm can effectively improve the precision of the robot motion control in the whole work space where the robot can arrive and its control effect is better than traditional method of PVT control.
Key words: parallel robot ; working space ;trajectory planning; spatial interpolation; error control
0引言
自从柔性自动化生产线得到大规模应用,并联机器人以其快速性、稳定性和准确性被广泛应用于分栋、包装、抓取、装配等领域。并联机器人由动平台、静平台、主动臂、从动臂构成,其运动特点是每个手臂由独立驱动器输入,最终又因共同约束而得到唯一输出,具有刚度大、承载能力强、精度高、自重负荷比小及动力性能稳定等一系列优点。由于传统Delta并联机器人空间插补算法,在快速性和精度上都没有达到系统可实现的最高性能指标,在针对Delta这种非线性强耦合机构时,传统插补算法很难实现高精度和快速性要求。分析Delta并联机器人单步插补运动状态,通过不同的插补策略,在精度控制和快速性控制上都可有相应改善。
1Delta并联机器人介绍 1.1并联机器人运动学
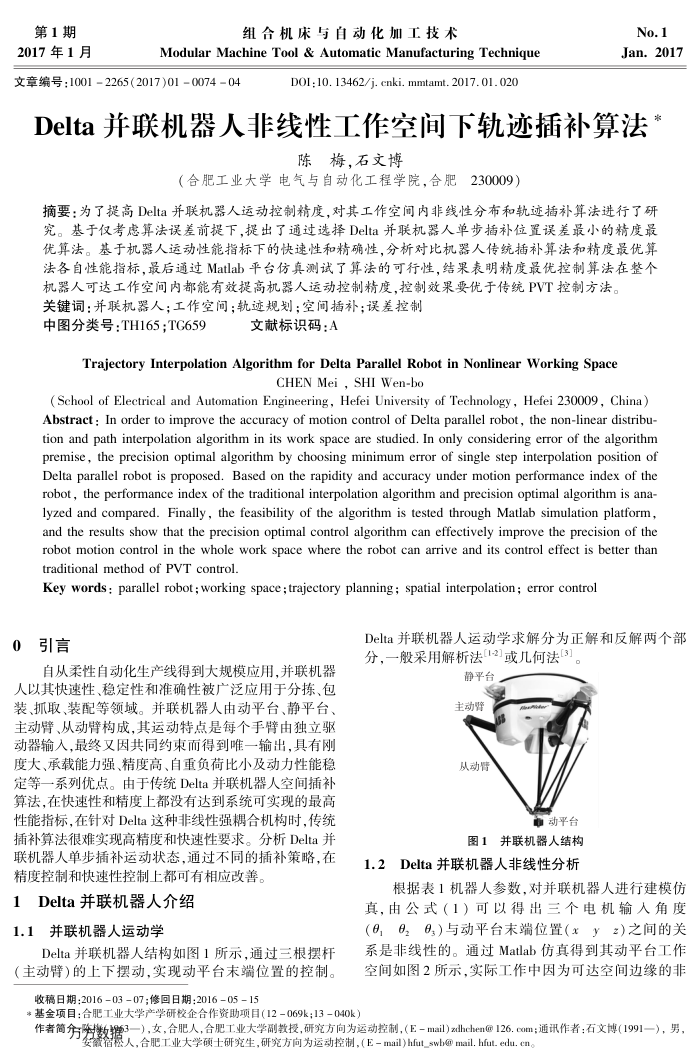
Delta并联机器人结构如图1所示,通过三根摆杆(主动臂)的上下摆动,实现动平台末端位置的控制。
收稿日期:20160307;修回日期:2016-05-15
*基金项目:合肥工业大学产学研校企合作资助项目(12-069k;13-040k)
Delta并联机器人运动学求解分为正解和反解两个部分,一般采用解析法[1-2]或几何法[3]。
静平台主动臂
从动臂
中动平台
图1并联机器人结构
1.2Delta并联机器人非线性分析
根据表1机器人参数,对并联机器人进行建模仿真,由公式(1)可以得出三个电机输人角度(,6)与动平台末端位置(xy)之间的关系是非线性的。通过Matlab仿真得到其动平台工作空间如图2所示,实际工作中因为可达空间边缘的非
作者简务附数播3一),女,合肥人,合肥工业大学副教授,研究方向为运动控制,(E-mail)dhchen@126.com;通讯作者:石文博(1991一),男,
安微宿器人,合肥工业大学硕士研究生,研究方向为运动控制,(E-mail)hfut_swb@mail.hfut.edu.cn