基于51单片机的三自由度气动机械手控制系统的设计
内容简介
 第28卷第1期 2015年1月
第28卷第1期 2015年1月文章编号:1002-6673(2015)01-087-02
机电产品开发与制新
Development & Innovation of Machinery & Electrical Produets
Vol.28,No.1 Jan.,2015
基于51单片机的三自由度气动机械手控制系统的设计
陈林祥,王正初
(台州学院机械工程学院,浙江台州318000)
要:论文阐述了机械手的特点和重要用途,针对3自由度气动机械手的结构和系统控制要求,设计了摘
以51单片机为核心的拉制系统硬件电路和系统的软件。该系统分别能采用本地按键控制和上位机控制。结果表明该控制系统是可行的。
关键调:单片机;机械手:控制系统
中图分类号:TP2412:TP138
文献标识码:A
doi:10.3969/j.issn.10026673.2015.01.031
ControlSystemDesignof3DegreeFreedomPneumaticRoboticArmBasedon51MCU
CHEN LinXiang, WANG ZhengChu
(Taizhou University Mechanical College, Taizhou Zhejiang 318000, China)
Abstract: The paper introduces important application and characteristics of the robotic arm, according to the structure and system control re-quirements of the 3 degree freedom pneumatic robotic arm, it designs the control system hardware circuit of 51 mcu as the core and sof-
ware. The system can respectively adopt local key control and PC control., The results show that the control system is feasible. Key word: mcu; robotic arm; control system
0引言
机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,是在机械化、自动化生产过程中发展起来的一种新型装置。机械手是近些年发展起来的一种高端科技自动化生产设备,是工业机器人的一个重要分支。它的特点是可以通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点。机械手能代替人类完成危险、重复枯媒的工作,减轻人类劳动强度,提高劳动生产率。近年来,机械手已受到许多部门的重视,并越来越广泛地得到应用,特别在机械行业中它可用于零部件组装,加工工件的搬运、装卸等等。
13自由度气动机械手结构及其控制系统要求
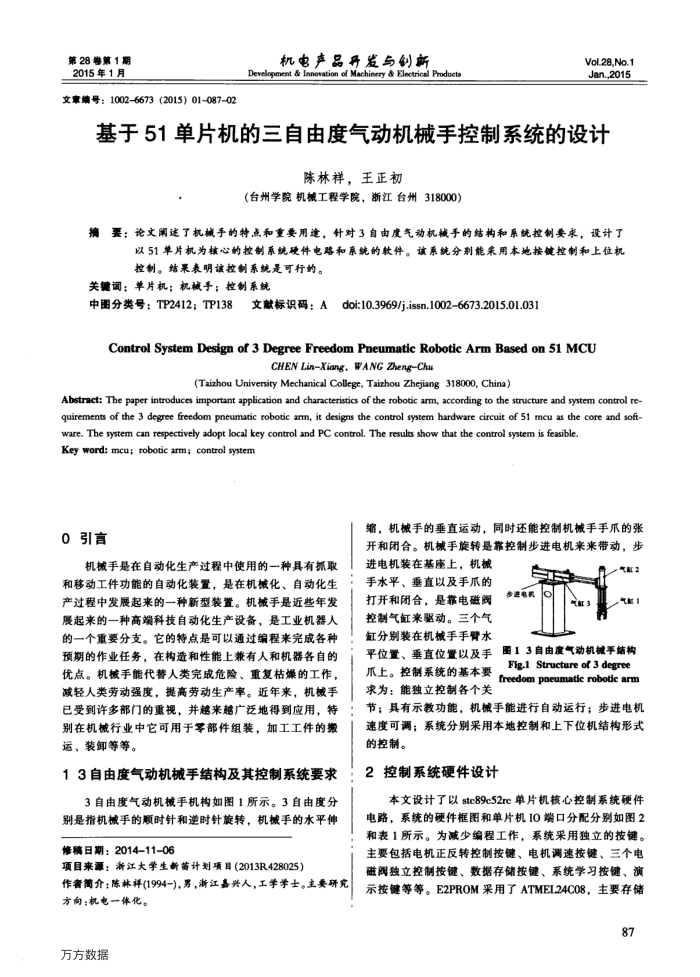
3自由度气动机械手机构如图1所示。3自由度分别是指机械手的顺时针和逆时针旋转,机械手的水平伸修稿日期:2014-11-06
项目来源:浙江大学生新苗计划项目(2013R428025)
作者简介:陈林祥(1994-),男,浙江嘉兴人,工学学士。主要研究
方向:机电一体化。万方数据
缩,机械手的垂直运动,同时还能控制机械手手爪的张开和闭合。机械手旋转是靠控制步进电机来来带动,步进电机装在基座上,机械
手水平、重直以及手爪的打开和闭合,是靠电磁阀控制气缸来驱动。三个气缸分别装在机械手手臂水
进电机
图13自由度气动机械手结构
平位置、垂直位置以及手
爪上。控制系统的基本要求为:能独立控制各个关
Fig.1 Structure of 3 degree freedom pneumatic robotic arm
节;具有示教功能,机械手能进行自动运行;步进电机速度可调;系统分别采用本地控制和上下位机结构形式的控制。
2控制系统硬件设计 2
本文设计了以stc89c52re单片机核心控制系统硬件电路,系统的硬件框图和单片机IO端口分配分别如图2 和表1所示。为减少编程工作,系统采用独立的按键。主要包括电机正反转控制接链、电机调速接链、三个电磁阀独立控制按键、数据存储按键、系统学习按健、演示按键等等。E2PROM采用了ATMEL24C08,主要存储
87
上一章:浮式风力发电机纵摇时气动性能研究
下一章:海上湿气对风力机叶片气动特性影响初探