探究基于PLC和触摸屏的工业汽轮机控制系统的设计
内容简介
 弧度的θ值的选择方面,如果安放错杆的钻孔直径Φ1太小了,那么就会直接导致孔径差H变得比较小,进而其弯曲段的延展空间就受到了很大的限制。如果是为了满足弧度的需要,那么就把钻孔的直径中1取值大一些,就会直接导致成孔速度的降低以及锚固效果的降低等间题。在弯曲单元方面,其弧度
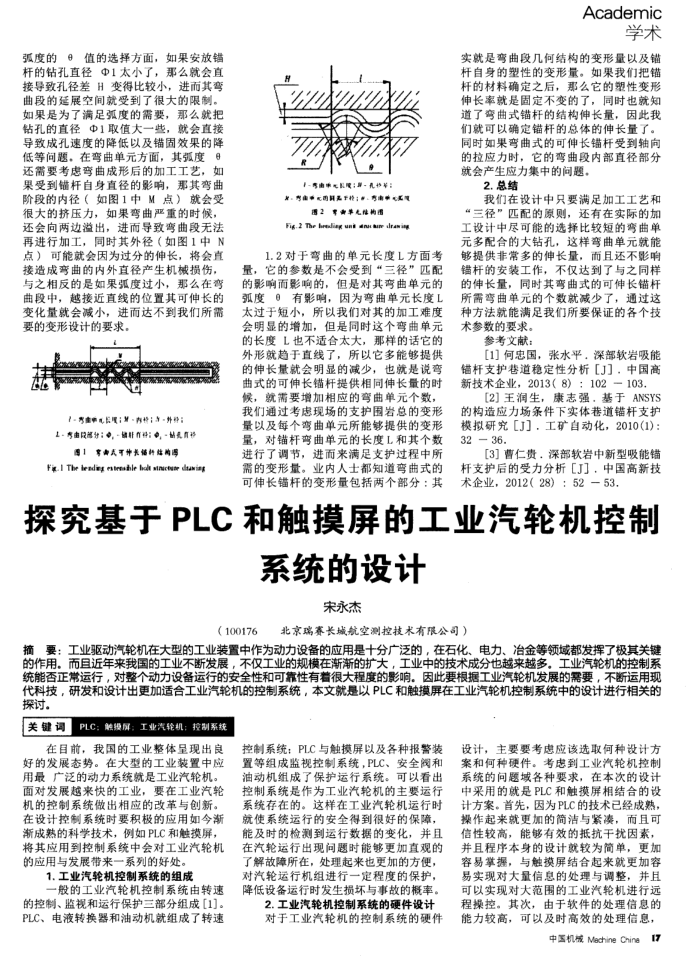
弧度的θ值的选择方面,如果安放错杆的钻孔直径Φ1太小了,那么就会直接导致孔径差H变得比较小,进而其弯曲段的延展空间就受到了很大的限制。如果是为了满足弧度的需要,那么就把钻孔的直径中1取值大一些,就会直接导致成孔速度的降低以及锚固效果的降低等间题。在弯曲单元方面,其弧度还需要考虑弯曲成形后的加工工艺,如果受到错锚杆自身直径的影响,那其弯曲阶段的内径(如图1中M点)就会受很大的挤压力,如果弯曲严重的时候,还会向两边溢出,进而导致弯曲段无法再进行加工,同时其外径(如图1中N 点)可能就会因为过分的伸长,将会直接造成弯曲的内外直径产生机械损伤,与之相反的是如果弧度过小,那么在弯曲段中,越接近直线的位置其可伸长的变化量就会减小,进面达不到我们所需要的变形设计的要求。
27989780
1-零重单表E理:存格:-外: 1-专由R邮分:,-编#件:,-站表有国1自天牛销购
Fig.1 Tbr lesdieg ntrmiblr bak sinictuer duxiag
-
*.ya.
西
图2掌+羊无丝的面
Fig.2 The bredlia
sedrani
1.2对于弯曲的单元长度L方面考量,它的参数是不会受到“三径”匹配的影响面影响的,但是对其弯曲单元的弧度e有影响,因为弯曲单元长度L 太过于短小,所以我们对其的加工难度会明显的增加,但是同时这个弯曲单元的长度L也不适合太大,那样的话它的外形就趋于直线了,所以它多能够提供的伸长量就会明显的减少,也就是说弯曲式的可伸长锚杆提供相同伸长量的时候,就需要增加相应的弯曲单元个数,我们通过考患现场的支护围岩总的变形量以及每个弯曲单元所能够提供的变形量,对锚杆弯曲单元的长度L和其个数进行了调节,进而来满足支护过程中所需的变形量。业内人士都知道弯曲式的可伸长杆的变形量包括两个部分:其
Academic
学术
实就是弯曲段几何结构的变形量以及锚杆自身的型性的变形量。如果我们把错杆的材料科确定之后,那么它的塑性变形伸长率就是固定不变的了,同时也就知道了弯曲式锚杆的结构伸长量,因此我们就可以确定锚杆的总体的伸长量了。同时如果弯曲式的可伸长镭杆受到轴向的拉应力时,它的弯曲段内部直径部分就会产生应力集中的问题。
2.总结
我们在设计中只要满足加工工艺和“三径”匹配的原则,还有在实际的加工设计中尽可能的选择比较矩的弯曲单元多配合的大钻孔,这样弯曲单元就能够提供非常多的伸长量,而且还不影响错杆的安装工作,不仅达到了与之同样的伸长量,同时其弯曲式的可伸长锚杆所需弯曲单元的个数就减少了,通过这种方法就能满足我们所要保证的各个技术参数的要求。
参考文献:
[1]何忠国,张水平,深部软岩吸能锚杆支护巷道稳定性分析[J],中国高新技术企业,2013(8):102103
[2]王润生,康志强,基于ANSYS 的构造应力场条件下实体巷道锚杆支护模拟研究[J],工矿自动化,2010(1): 3236
[3]曹仁贵.深部软岩中新型吸能锚
杆支护后的受力分析亡,中国高新技术企业,2012(28):52―53.
探究基于PLC和触摸屏的工业汽轮机控制
系统的设计
宋永杰
(100176北京瑞赛长城航空测控技术有限公司)
摘要:工业驱动汽轮机在大型的工业装置中作为动力设备的应用是十分广泛的,在石化、电力、治金等领域都发挥了极其关键工工工“ 统能否正常运行,对整个动力设备运行的安全性和可靠性有着很大程度的影响。因此要根据工业汽轮机发展的需要,不断运用现代科技,研发和设计出更加适合工业汽轮机的控制系统,本文就是以PLC和触摸屏在工业汽轮机控制系统中的设计进行相关的探讨。
PLC:能模屏:工业汽轮机:控制系统
关键词
在目前,我国的工业整体呈现出良好的发展态势。在大型的工业装置中应用最广泛的动力系统就是工业汽轮机。面对发展越来快的工业,要在工业汽轮机的控制系统做出相应的改革与创新。在设计控制系统时要积极的应用如今渐渐成熟的科学技术,例如PLC和触模屏:将其应用到控制系统中会对工业汽轮机的应用与发展带来一系列的好处。
1.工业汽轮机控制系统的组成
一般的工业汽轮机控制系统由转速的控制、监视和运行保护三部分组成[1]。 PLC、电液转换器和油动机就组成了转速
控制系统:PLC与触摸屏以及各种报警装置等组成监视控制系统,PLC、安全阀和油动机组成了保护运行系统。可以看出控制系统是作为工业汽轮机的主要运行系统存在的。这样在工业汽轮机运行时就使系统运行的安全得到很好的保障,能及时的检测到运行数据的变化,并且在汽轮运行出现间题时能够更加直观的了解故障所在,处理起来也更加的方便,对汽轮运行机组进行一定程度的保护,降低设备运行时发生损坏与事故的概率。
2.工业汽轮机控制系统的硬件设计对于工业汽轮机的控制系统的硬件
设计,主要要考虑应该选取何种设计方案和何种硬件。考到工业汽轮机控制系统的问题域各种要求,在本次的设计中采用的就是PLC和触模屏相结合的设计方案。首先,因为PLC的技术已经成熟,操作起来就更加的简洁与紧凑,而且可信性较高,能够有效的抵抗于扰因素,并且程序本身的设计就较为简单,更加容易掌握,与触摸屏结合起来就更加容易实现对大量信息的处理与调整,并且可以实现对大范围的工业汽轮机进行远程操控。其次,由于软件的处理信息的能力较高,可以及时高效的处理信息,
中国机械Mechine Chin17