您当前的位置:首页>论文资料>不确定系统的椭圆区域极点配置
内容简介
 ・学术论坛・
・学术论坛・不确定系统的圆区域极点配置
林宇峰
(福州大学数学与计算机科学学院
福建福州
350108)
数字技术与应用
【摘要]本文应用线性矩阵不等式方法(LMIs)给出了圆区域的LMIs表示形式,研究了不确定连续和离散系统的区域极点配置向题,讨论了使闭环系统的所有极点配置在给定的赖圆区城的充分必要条件。所给的定理推广了基于圆盘区域的极点配置间题,最后通过实例仿真验证了该定理的有效性。
[关键词]钟梯D稳定
Schur补定理
[中图分类号]TP273
线性矩阵不等式(LMIs)
极点配罩
稠园区城
[文章编号]1007~9416(2010)06-0127-02
[文献标识码]A
PoleAssignmentforUncertainLinearSvstemsinaspecifiedEllipse
Lin Yufeng
(Mathematics and Computer Science College of Fuzhou University, Fujian Fuzhou 350108)
[Abstract)Linear matrix inequalities (LMIs) form of the ellipse domain is addressed based on the linear matrix inequalities (LMIs) approach.The sufficient condition of the pole assignment of the uncertain systems and disperse systems is derived based on LMls eieoee
[Key wordsrobust Dstability,schur theorem, linear matrix inequalities (LMIs), pole assignment,llipse domain
1引言
控制理论的一个基本向题是设计反馈控制律,将闭环系统的极点配置在期望的位置,即极点配置向间题。事实上,精确的极点配置是不需要的,只要满足将闭环系统的极点配置在左半复平面的一个指定位置就可以了。近年,不同区城的极点配置间题理论的研究已经十分括跃11-6],例如:垂直或水平带区域,房形区城川,圆形区城6)和双由线等区域的极点配置都取得了一些进展,事实上,我们可以将两盘区域的极点配置间题推广到循四区域,燃面,对于概圆区域的鲁率稳定性研究却鲜见报道,
本文主要研究赖阅区域的LMIs表示形式,并应用LMIs方法,来设计状态反馈控制器,使闭环系统的极点配置在给定的楞圆区域内,推广了基于圆盘区域内的板点配置,景后,通过仿真算例,证明了该定理的可行性。
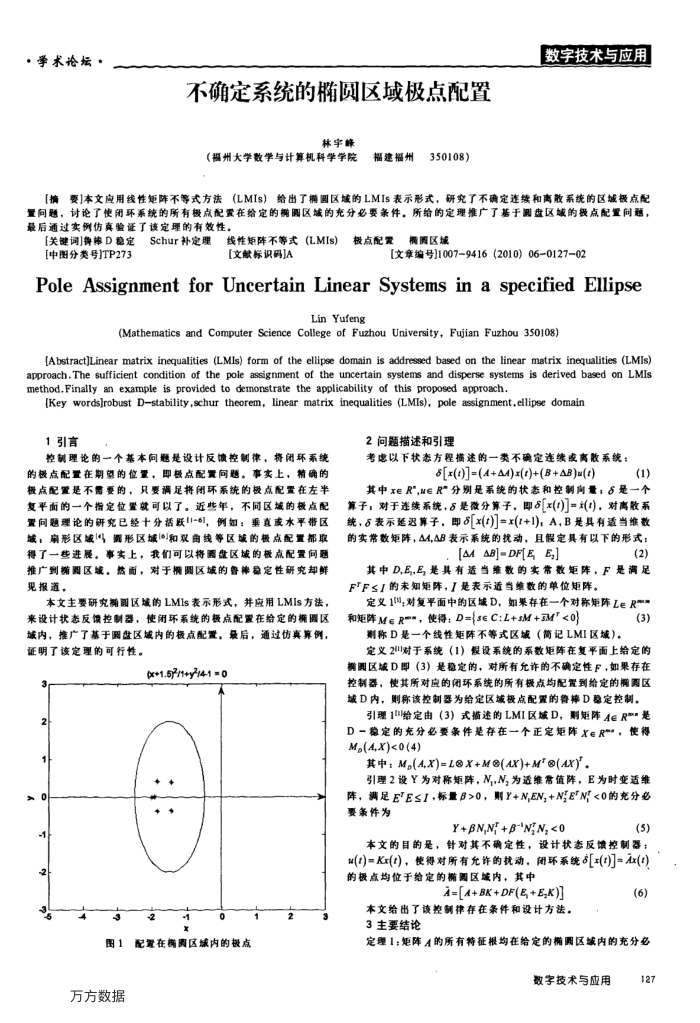
(x+1.5)/1+y/14-1 = 0
2 2
0
x
图1 万方数据
配置在棚阅区域内的极点
2问题描述和引理
考以下状态方程描述的一类不确定连续或离败系统:
8[r()]=(4+4)x(t)+(B+B)()
(1)
其中xeR",weR"分别是系统的状态和控制向量;S是一个算子,对于连续系统,5是微分算子,即S[x(0)]=(0),对离系统,5表示延迟算子,即5[x(t)=x(t+1),A,B是具有适当维数的实常数矩降,44,4B表示系统的扰动,且假定具有以下的形式:
[MB]=DF[EE]
(2)
其中D,E,E是具有适当维数的实常数矩阵,F是满足 FTF≤I的未知矩阵,是表示适当维数的单位矩。
定义1,对复平面中的区域D,如果存在一个对称矩阵LeR 和矩阵MeR"*,使得:D={seC:L+sM+3M"<0)
(3)
则称D是一个线性矩阵不等式区城(简记LMI区域)。
定义2对于系统(1)假设系统的系数矩阵在复平面上给定的概圆区城D即(3)是稳定的,对所有允许的不确定性F,如果存在控制器,使其所对应的闭环系统的所有极点均配置到给定的耦两区域D内,则称该控制器为给定区域极点配置的鲁棒D稳定控制。
引理1给定由(3)式描速的LMI区城D,则矩降AeR是 D-稳定的充分必要条件是存在一个正定矩阵XeR*",使得 M,(4,X)<0 (4)
其中:M(4.X)=L@X+M@(Ax)+M"@(AX).
引理2设Y为对称矩阵,N,N,为适维需值阵,E为时变适维阵,满足E'E≤I,标量B>0,则Y+N,EN,+NJE'NI<0的充分必要条件为
Y+βN,N, +β-"N,N, <0
(5)
本文的目的是,针对其不确定性,设计状态反馈控制器; u(0)=Kx(0),使得对所有允许的扰动,闭环系统[x(t)=Ax(t) 的极点均位于给定的椭圆区城内,其中
A=[4+ BK + DF(E + E,K)]
本文给出了该控制律存在条件和设计方法。 3主要结论
(6)
定理1:矩阵A的所有特征根均在给定的椭圆区域内的充分必
数字技术与应用
127