您当前的位置:首页>论文资料>步进电动机加减速定位控制的数字信号仿真
内容简介
 数字执车与度用
数字执车与度用数控技术
步进电动机加减速定位控制的数字信号仿真
向涛峰
(中国船舶重工集团公司第七一O研究所湖北宜昌443003)
摘要:步进电动机运用广泛,易于实现自动数字控制。本文针对步进电动机起动容易出境的“失步"境象,采取加减造定位控制的方法,并利用 Proteus软件建立了步进电机加减速定位控制的电路仿真模型,在Kei软件下进行源程序编译和联调仿真。仿真结果显示在该种控制方法下,步进电机运行效果良好。
关键词:步进电动机“失步"现象加减速定住控制ProteusKeil
中图分类号:TM341
文献标识码:A
步进电动机是一种用脉冲控制的电机,利用单片机的四个8位可编程/O口很容易对其实现数字控制。基于微控制器控制的步进电动机系统,易于控制,易于定位,在精确控制中特点尤为突出叫。步进电动机以数字信号来驱动。若每旋转一圈以10个励磁信号来计算,则每个励磁信号能使步进电动机前进36°。旋转角度与脉冲数成正比,正反转则由助磁脉冲顺序来控制。步进电动机的励磁方式有1 相助磁、2相助磁及1~2相励磁三种方式。1~2相励磁法为1相与2相轮流交替导通,属于半步进的方式。因分辨率提高,且运转平滑,每步可走18°,故被广泛采用。著以其控制步进电动机正转,其励磁
顺序见表1。若励磁信号反向,则步进电动机反转。 1步进电动机加减速定位控制原理
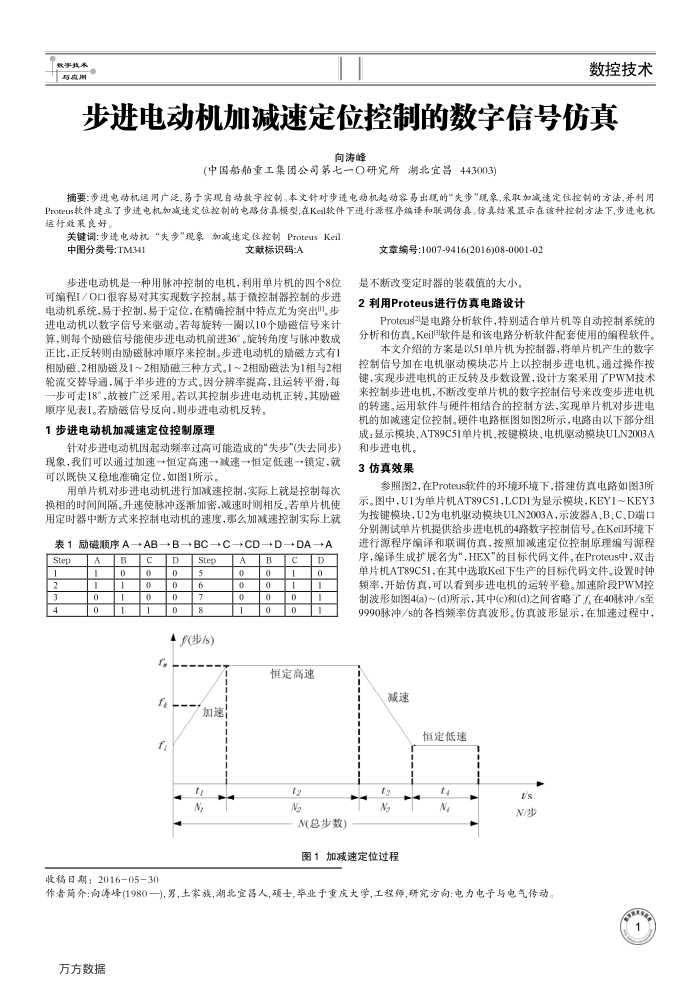
针对步进电动机因起动频率过高可能造成的“失步"(失去同步)现象,我们可以通过加速一恒定高速一减递一恒定低速一锁定,就可以既快又稳地准确定位,如图1所示。
用单片机对步进电动机进行加减速控制,实际上就是控制每次换相的时间间隔。升速使脉冲逐渐加密,减速时则相反,若单片机使用定时器中断方式来控制电动机的速度,那么加减速控制实际上就
→AB
表1励磁顺序A
+B
Step 1
3
0 0
B 0 1 1
0 0
D 0 0 0 o
→BC→C
→CD
das 6
4(步/s) f
加速
f
t N
收稿日期:2016-05-30
A 0 0
+D
B 0
0 0
+DA
C 1 1 0 0
→A
D 0 1
恒定高速
t2 Na
N(总步数)
文章编号:1007-9416(2016)08-0001-02
是不断改变定时器的装载值的大小。 2利用Proteus进行仿真电路设计
Proteus-是电路分析软件,特别适合单片机等自动控制系统的分析和仿真。Keil软件是和该电路分析软件配套使用的编程软件。
本文介绍的方案是以51单片机为控制器,将单片机产生的数字
控制信号加在电机驱动模块芯片上以控制步进电机。通过操作按键,实现步进电机的正反转及步数设置,设计方案采用了PWM技术来控制步进电机,不断改变单片机的数字控制信号来改变步进电机的转速。运用软件与硬件相结合的控制方法,实现单片机对步进电机的加减速定位控制。硬件电路框图如图2所示,电路由以下部分组成:显示模块、AT89C51单片机、按键模块,电机驱动模块ULN2003A
和步进电机。 3仿真效果
参照图2,在Proteus软件的环境环境下,搭建仿真电路如图3所示。图中,U1为单片机AT89C51,LCD1为显示模块,KEY1~KEY3 为按键模块,U2为电机驱动模块ULN2003A,示波器A,B.C.D端口分别测试单片机提供给步进电机的4路数字控制信号。在Keil环境下进行源程序编译和联调仿真,按照加减速定位控制原理编写源程序,编译生成扩展名为”.HEX"的目标代码文件,在Proteus中,双击单片机AT89C51,在其中选取Keil下生产的目标代码文件。设置时钟频率,开始仿真,可以看到步进电机的运转平稳。加速阶段PWM控制波形如图4(a)~(d)所示,其中(c)和(d)之间省略了在40脉冲/s至 9990脉冲/s的各档频率仿真波形。仿真波形显示,在加速过程中,
减速
恒定低速
t N
图1加减速定位过程
t4 N
t's N/步
作者简介:向涛峰(1980一),男,土家族,湖北宜昌人,硕士,章业于重庆大学,工程师,研究方向:电力电子与电气传动。万方数据
上一章:SVC存储虚拟化在容灾系统中的应用研究
下一章:不确定系统的椭圆区域极点配置