您当前的位置:首页>论文资料>基于ARM及蓝牙技术的智能搬运机器人
内容简介
 数控技术
数控技术基于ARM及蓝牙技术的智能搬运机器人
杨华1吴敏”
与质用
(1.常州纺织服装职业技术学院机电工程系,江苏常州213000;2.常州华迪特种变压器有限公司,江苏常州213016)
摘要:设计制作一个智能截运机器人,可类人站立,选择双轮自平衡方案,由于两轮共轴、独立驱动、车身重心住于车轮轴上方,通过运动保持平衡,可以直立运动,对于地形的变化也有很强的适应能力,有着良好的运动性能,因此择用来微微运机器人的主要结构最合适,而且便与收纳并支持蓝牙控制,
关键词:机器人;蓝牙;自平衡中图分类号:TP393
文献标识码:A
1引言
现实生活中,搬运机器人节省我们人类劳动力是个远大的理想,采用双电机驱动自平衡巧妙地利用地心引力使其自身保持平衡,并将自身重力转换成动能,便于移动,具有环保的特点。另外期运机器人小巧,转弯灵活,可以在狭窄、大转角的工作场合作业,也可以在陆地上快速移动并进行物品的搬运,我们可以通过手机APP 进行操作控制,指引机器人向目的地前进,可以在工厂、学校、餐厅、家庭中广泛使用。另外搬运机器人有个显著的特点在于,单个搬运数量并不多,但是当机器人数量越多则搬运货物体积越大,数量也越多,比如搬运集装箱,底下可以放置很多个机器人一起行动。这类体积小巧的机器人便于收纳,完全弥补生产产线需要设计高成本产
线设备的缺点,随时可以取出应用。 2整体功能
本设计的控制驱动电路板是整个搬运机器人组成的核心,根据查阅资料搜索双轮自平衡的功能特点,选择MPU一6050这款6轴运动处理传感器采集车体的状态信息选择TB6612这款直流电机驱动芯片进行双电机驱动;选择光电缩码器采集车体速度信息;选择370 金属齿轮直流减速电机;控制器采用STM32单片机完成数据采集与处理、车体状态信息判断直流减速电机控制及蓝牙与手机APP通讯
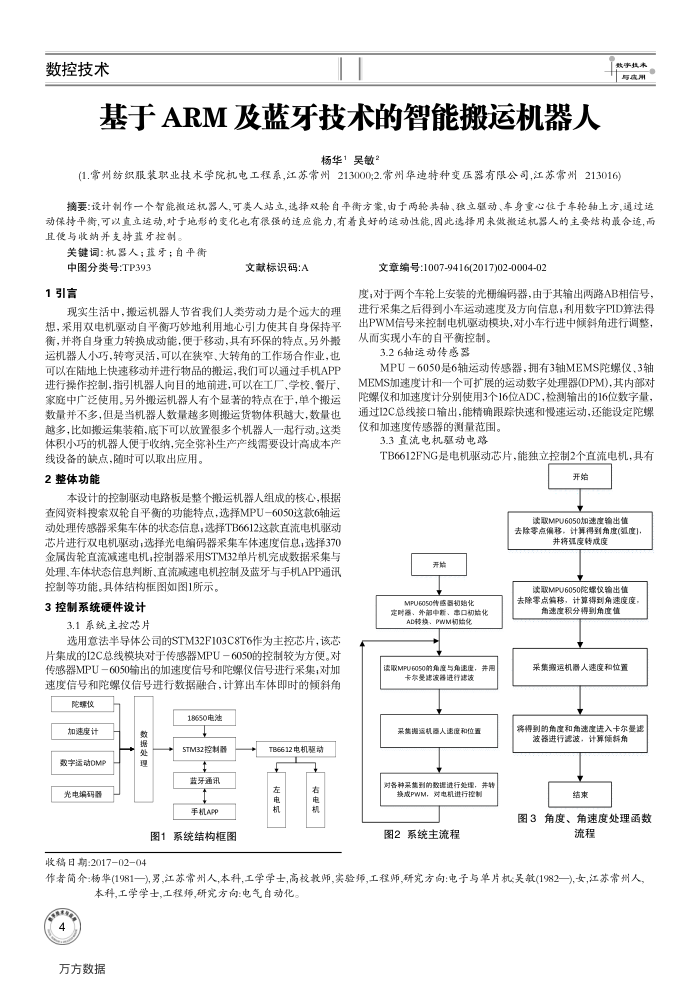
控制等功能。具体结构框图如图1所示。 3控制系统硬件设计
3.1系统主控芯片
选用意法率导体公司的STM32F103C8T6作为主控芯片,该芯片集成的I2C总线模块对于传感器MPU一6050的控制较为方便。对传感器MPU-6050输出的加速度信号和陀螺仪信号进行采集;对加速度信号和陀螺仪信号进行数据融合,计算出车体即时的倾斜角
陀螺仪
18650电池
加速度计数字运动OMP 光电编码器
数
据理
收稿日期:2017-02-04
STM32控制器蓝牙通讯手机APP
图1系统结构框图
TB6612电机驱动 +
左电机
右电机
文章编号:1007-9416(2017)02-0004-02
度;对于两个车轮上安装的光栅编码器,由于其输出两路AB相信号,进行采集之后得到小车运动速度及方向信息;利用数字PID算法得出PWM信号来控制电机驱动模块,对小车行进中倾斜角进行调整,从面实现小车的自平衡控制。
3.26轴运动传感器
MPU-6050是6轴运动传感器,拥有3轴MEMS陀螺仪、3轴 MEMS加速度计和一个可扩展的运动数字处理器(DPM),其内部对陀螺仪和加速度计分别使用3个16位ADC,检测输出的16位数字量,通过I2C总线接口输出,能精确跟踪快速和慢速运动,还能设定陀螺仪和加速度传感器的测量范围。
3.3直流电机驱动电路
TB6612FNG是电机驱动芯片,能独立控制2个直流电机,具有
开始
读取MPU6050加速度输出值去除零点偏移,计算得到角度(弧度)
并将弧度转成度
开始
读取MPU6050陀爆仪输出值去除零点编移,计算得到速度度
MPU6050传盛器机始化定时器、外超中新、事口初始化 AD转换、PWM初始化
素MP6050的鱼度与急速度
,并用
卡尔曼建安器进行建流采基据运机函人速度和位置
对各种采集到的数提进行处理,并转换成PWM,对电机进行控制
图2系统主流程
角速度积分得到角度值采集现运机器人速度和位置
将得到的角度和角速定选入卡尔曼
波器进行滤波,计算倾料角
结束
图3角度、角速度处理函数
流程
作者简介:杨华(1981一)男,江苏常州人,本科,工学学士,高校教师,实验师,工程师,研究方向:电子与单片机吴敏(1982一),女,江苏常州人
本科,工学学士,工程师,研究方向:电气自动化
万方数据
上一章:机器人-章鱼保罗-的设计与实现
下一章:基于5VS5仿真机器人足球区域防守策略设计