����ǰ��λ�ã���ҳ>��������>���������Թ�������㷨�����ģ��ʵ��
���������Թ�������㷨�����ģ��ʵ��
���ݼ��
 �����������
������������㷨����
���������Թ�������㷨�����ģ��ʵ��
����ѧ
(ɽ��Ӣ��ѧԺɽ������250104)
ժҪ������ʵ���˻��������ٹ�����ļ����ģ�⣬����������״�ٹ��ĺ������ݽṹ��ʾ���������˻��������ٹ��������н������̽�ⷽ��������˺��������ݽṹ���㷨��¼���������ߵ�¶���������˻�����ͼ���㷨���н������㷨�����в�ʵ���˸��ݻ�����̽��õ��Ľ����������õ�����㵽�յ�����·��������ģ��ʵ�ֻ��������ٹ���Χ������Ѱ���Ҵ���㵽�յ���·����
�ؼ������������ٹ������ij�����̽��
��ͼ����ţ�TP301.6
���ױ�ʶ�룺A
���±�ţ�1007-9416(2011)10-0113-02
Algorithm Designing and Simulation for
MazeRealizedbyRobot
Hao Shenxue
(ShanDong Yingcai University Jinan 250104)
Abstract:The maze realized hy robot is simulation in program. The data structure is described in this paper, and the direction detected method is ako described. The path that rohot through hy is saved, the lhack tracing algorithm and the move up control method are illuminated in this paper. The path from start=point to endpoint is fotind, the shortest path in the detected grids by robot is aso can be found.
Key words:robot maze hack tracing direction detected
1������
���Ż����˼����ķ�չ�������ƶ���������δ֪�����ڡ�����̽�⡢��̬������滮�н�·�����о���Ϊ--����Ҫ��֧�����������ٹ�����û������Ԥ����£�ͨ���������Դ�������̽���ٹ����������������н�·�ߣ��Ӷ�ʵ�ִӵݹ���㵽�յ�ĵ�·���̡��������ߵݹ�Ҳ�ǻ����˱����ij�����Ŀ֮һ������ּ�����ü�������ģ��ʵ�ֻ������ߵݹ����⣬�����������ߵݹ��㷨���˼·��ʵ�ֹ��̣���ͨ���������ݽṹ���㷨�������������Թ���·Ч�ʡ�
�Թ����������ݽṹ�е�-һ���������⣬ͨ���й������̽�ⷨ���������̽�ⷨ��������ջ�Ͷ���ʵ�������̡����������Թ�������������Ҫ��������˹�����ƣ����ļٶ��������Ѿ߱�ǰ�������ת��90�ȣ�̽��ǰ���ϰ���Լ�̽����������������Ƿ�ı�ȹ��ܡ�������Ҫ����������������·�㷨���̼�������ݽṹ��ơ�
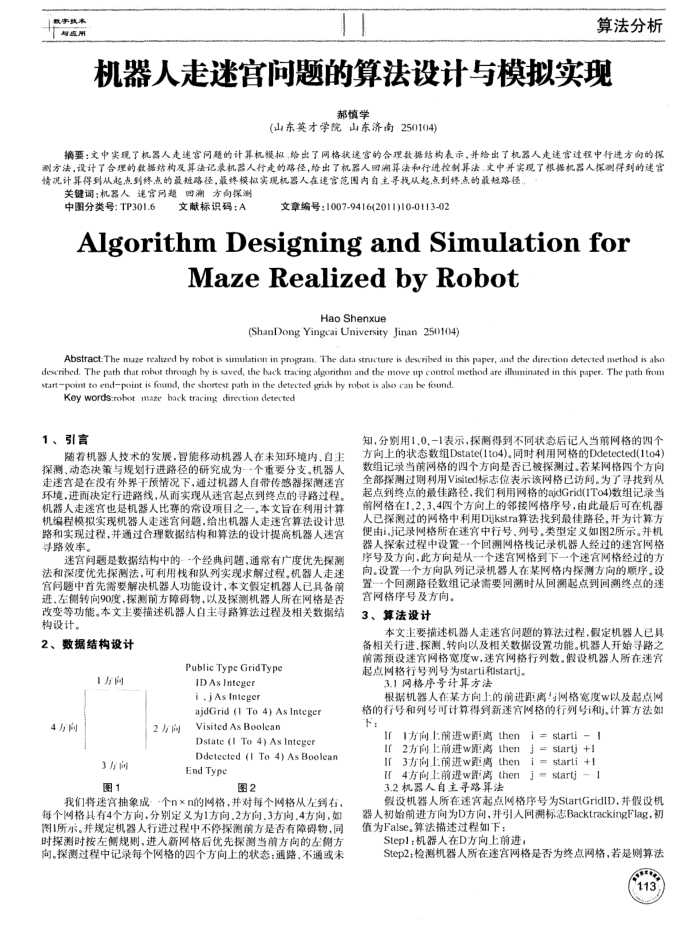
2�����ݽṹ���
Public Type GridType
1��
4��
3 ͼ1
2��
ID As Integer i .jAs Integer
ajdGrid (1 To 4) As Integer Visited As Boolean
Dstate (1 To 4) As Integer
Ddelected (1 To 4) As Booiean End Type
ͼ2
���ǽ��Թ�����ɡ�-��n��n��������ÿ����������ң�ÿ���������4�����ֱ���Ϊ1����2����.3���䣬4������ͼ1��ʾ�����涨�������н������в�ͣ̽��ǰ���Ƿ����ϰ��ͬʱ̽��ʱ���������������������̽�ǰ���������̽������м�¼ÿ��������ĸ������ϵ�״̬��ͨ·����ͨ��δ
֪���ֱ���1��0��һ1��ʾ��̽��õ���ͬ״̬����˵�ǰ������ĸ������ϵ�״̬����Dstate(1to4)��ͬʱ���������Ddetected(1to4) �����¼��ǰ������ĸ������Ƿ��ѱ�̽�������ij�����ĸ�����ȫ��̽���������Visited��־λ��ʾ�������ѷü䡣Ϊ��Ѱ�ҵ�����㵽�յ�����·�����������������ajdGrid(1To4)�����¼��ǰ������1��2��3��4�ĸ������ϵ��ڽ�������ţ��ɴ������ڻ�������̽���������������Dijkstra�㷨�ҵ����·������Ϊ���㷽ʹ��1����¼���������ٹ����кš��кš����Ͷ�����ͼ2��ʾ����������̽������������һ����������ջ��¼�����˾����ĵݹ�������ż����˷����Ǵ�һ���칬������һ���ݹ������ķ�������һ��������м�¼��������ij������̽�ⷽ���˳������һ���س�·�������¼��Ҫ����ʱ�ӻ�����㵽�س��յ����
��������ż����� 3���㷨���
������Ҫ����������������������㷨���̣��ٶ��������Ѿ߱�����н���̽�⣬ת���Լ�����������ù��ܡ������˿�ʼѰ·֮ǰ��Ԥ����������W���Թ���������������������������Թ���������к��к�Ϊstarti��startj��
3.1������ż��㷽��
���ݻ�������ij����ǰ�������������W�Լ����������кź��кſɼ���õ��¹���������кź͡����㷽����
1����.��ǰ��w����then
i=starti-!
2����.��ǰ��w����then
j = startj +1
If3������ǰ��w����then
i = starti +1
f4������ǰ��w·��then
j= startj-1
3.2����������Ѱ·�㷨
��������������ٹ�����������ΪStartGridID������������˳�ʼǰ������ΪD����������ݱ�־BacktrackingFlag����ֵΪFalse���㷨�����������£�
Step1����������D������ǰ����
Step2���������������Թ������Ƿ�Ϊ�յ������������㷨
113