基于RGB-D系统的清扫机器人与传统清扫机的路径对比研究
内容简介
 应用研究
应用研究基于RGB-D系统的清扫
机器人与传统清扫机的路径对比研究
林财德吴黄酷余罗兼*
(福建工程学院机械与汽车工程学院福建福州350118)
要款与成用
摘要:通过对比传统触理式家用移动清担机器人和采用RGB-D视觉系统的家用移动清担机器人实际工作露径效果,发现两者的总体路径相率是相当的。采用RGB-D视受系统的家用移动清妇机器人的路径效果略低,这与视场规则及使用环境的光线有很大关系。通过本次的对比试验,对工程设计人的进一步开发有着重要意义。
关键词:清扫机器人RGB-D路径规划
文献标识码:A
中图分类号:TG502.14
文章编号:1007-9416(2015)04-0078-02
Abstract:In this paper, by comparing the traditional touch home mobile cleaning robot and the RGBD visual system using domestic mobile cleaning robot path efect in practical work, found the general path fraction both is quite. RGBD visual system using the domestic mobile cleaning robot path effect is slightly low, which has much to do with the field planning and the use of the environment light. Through the contrast test of the time, is of great significance to further development of the engineering design personnel.
Key Words:cleaning robot, R.GBD,path planning
随着服务机器人产业的推进,家用移动清扫机器人已经得到普及并获得一定的市场认可度,然而,当前市场上销售的家用移动清扫机器人主要配置接触传感器,其算法及相关控制模块的研究已相对成熟;而配置RGB-D视觉为传感器件的机器人刚进人市场,其相关研究和操索还有待进一步深入.RGB-D视觉系统通过整合一个标准RGB摄像机和一个深度传感器,从而获得周围环境的三维空间信息。家用移动清扫机器人开发领城中的一个重要分支是路径规划技术,即在达到系统规划评价指标最优的前提下计算出一条在设定范围内从出发点到终止点且经过所有要求点的连续路径。路径规划的方法比较多,大致可以分为两种:基于任务导向的路径规划方法和基于行为导向的路径规划方法。前者对环境感知的要求较高,是
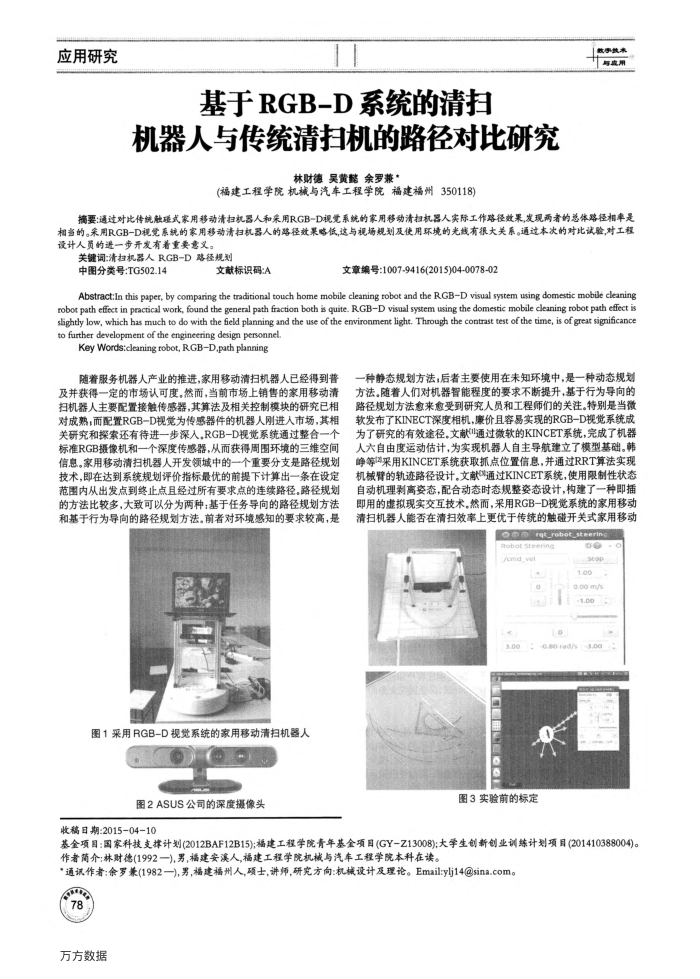
图1采用RGB-D视觉系统的家用移动清扫机器人
图2ASUS公司的深度摄像头
收稿日期:2015-04-10
一种静态规划方法,后者主要使用在未知环境中,是一种动态规划方法。随着人们对机器智能程度的要求不断提升,基于行为导向的路径规划方法愈来愈受到研究人员和工程师们的关注。特别是当微软发布了KINECT深度相机,康价且容易实现的RGB-D视觉系统成为了研究的有效途径,文献(通过微软的KINCET系统,完成了机器人六自由度运动估计,为实现机器人自主导航建立了模型基础。韩静等4采用KINCET系统获取抓点位置信息,并通过RRT算法实现机械臂的轨迹路径设计。文献*通过KINCET系统,使用限制性状态自动机理剥高姿态,配合动态时态规整姿态设计,构建了一种即插即用的虚拟现实交互技术,然而,采用RGB-D视觉系统的家用移动清扫机器人能否在清扫效率上更优于传统的触碰开关式家用移动
oorqt_robot_steering
bot steering
图3实验前的标定
DO Stop
7.00.00
基金项目:国家科技支撑计划(2012BAF12B15);福建工程学院青年基金项目(GY-Z13008);大学生创新创业训练计划项目(201410388004)。作者简介:林财德(1992―),男,福建安溪人,福建工程学院机械与汽车工程学院本科在读。
"通试作者:余罗兼(1982一),男,福建福州人,硕士,讲师,研究方向:机械设计及理论。Email:ylj14sina.com。 78
万方数据
上一章:仿真机器人发展及其技术探索
下一章:基于旅游寻宝应用环境下的智能机器人的研究与设计