����ǰ��λ�ã���ҳ>��������>����PWM�ź�ң�ػ����˵����������
����PWM�ź�ң�ػ����˵����������
���ݼ��
 ���ּ�����Ӧ��
���ּ�����Ӧ������PWM�ź�ң�ػ����˵����������
����Ԭ����
�
�����ݿվ�ѧԺ���յ�ҩϵ��������
221000)
��Ӧ���о���
Ҫ�����Ľ��һ����ػ����ˣ���ATmega16��Ƭ��Ϊ���Ŀ��������þ�ģ����������MG945�ܻ����������ƻ����˵��˶����û����˾��п������ſأ���ֱ������������������ȹ��ܡ���ϵ������ģ������ƶ��룬�����C���Զ�д��
�ؼ�����ATmega16��Ƭ����ͼ����ţ�TP242
1��������Ҫ��
��ģͨ����
MG945�ܻ�
���ױ�ʶ�룬A
���±�ţ�1007-94162010)10-0080-01
���ŵ羧��ܺ�һ����3ֻ������ɵķ�
��ATmega16��Ƭ��Ϊ���ģ�����һ����ػ����ˣ������˾��п��������أ���ֱ������������������ȹ��ܡ����߳���ʱ���ɺ�ģ�ܿ��������ܻ�ת����������С�ֲ����ƽ��������˶�����ֱ����ʱ��ͨ�������Ƶ����������������Ӣת����ɴ�ֱ����Ĺ�������������������ʱ������ͨ������ͨ�ؽ�ͨ����ģ���Դ����Ԥ����ƺõ������ļ������⣬
2ϵͳ��ɼ�����ԭ��
��ϵͳӲ��������Ҫ������ߵ�Ѳ�ص�·���ISP���ص�·���ӡ��ܻ����Ƶ�·�庸�ӵȣ�������Ҫ��ɵ��ԡ������豸�����������Ƶȹ��ܡ����ƻ����˶���ʱ���Ժ�ģң����������ź������ܻ��͵����ת��ʵ�ֻ����˱�����ƶ���������ͨ�ܻ����Ƶ�·���������Сϵͳһ ATmega16��Ƭ��ͨ��ִ��Ƭ��ָ����Ƹ���I/O�ڵ�����źţ���������Ӧ����������ɻ����˵��������
3��ҪӲ����· 3.1���ߵ�ң�ص�·
�ÿ��Ƶ�·���������ӵ�·����ط����·�ͽ���������·������Ҫ��������Ϊʱ����·�����555�����ڲ�������21��Ʒ�������ܣ�4����������ܺ�16��������ɵ�������ѹ�Ƚ�����һ��R-S��������һ
��ʼ���ÿ�������VO������幤�����������ö�������¼������ͼ1����������ͼ
80
���ּ�����Ӧ��������
ѹ����3ֻ����R1��R2��R3��Ϊ5KQ��
���ط����·��555���ɿ���R1��R2�� RP1.VD1��VD2��C1���һ������̬����ͼ���ɱ�ռ�ձ�������ͨ��RPI��ֵ�ĵ��ڣ�ռ�ձȵı仯��Χ�ɴﵽ1%һ99%�����50Hz�����ź�.VT1����ͼԪ������Ʒ����Ƶ��������ʽ������ʯӢƷ���ŵ��Ƶ��ѡ��27.145Hz��VTI���������ĸ�Ƶ�ؾ�555��·�����źŵ��ƣ������߷����ȥ������·����ʯӢ������Ƶ���ʹ����ɿ���
����������·����VT2������ΧԪ�����ɳ������첨�������ԭ���������źš��� C12��R7����IC2�����Ž��зŴŴ����źž�VD3��VD4��ѹ��������VT3���ƽ����ֱ����ѹ���õ�ѹ�Ĵ�С�뷢�͵IJ�ͬռ�ձ��źŲ����йأ�ռ�ձȴ�ѹ�ߣ���R11ΪVT4�ṩ��ƫִ���������ת�ٸߣ�ռ�ձ�С����ѹ�ͣ���R11ΪVT4 �ṩ��ƫִ����С�����ת��������ռ�ձ��㹻Сʱ��VT3��ֹ�������VT4��ʧȥƫ�ö�����ͨ�����ת��
3.2ISP���ص�·
���½ϵ�·ͨ������PC�����ں�AVR ��Ƭ���Ĵ���SPI���ߣ�ʵ��Ƭ��F1ash��
�ڿڼ��
�������������
N
����Խʱճ��
Y
1
ִ�ж�������ʱ
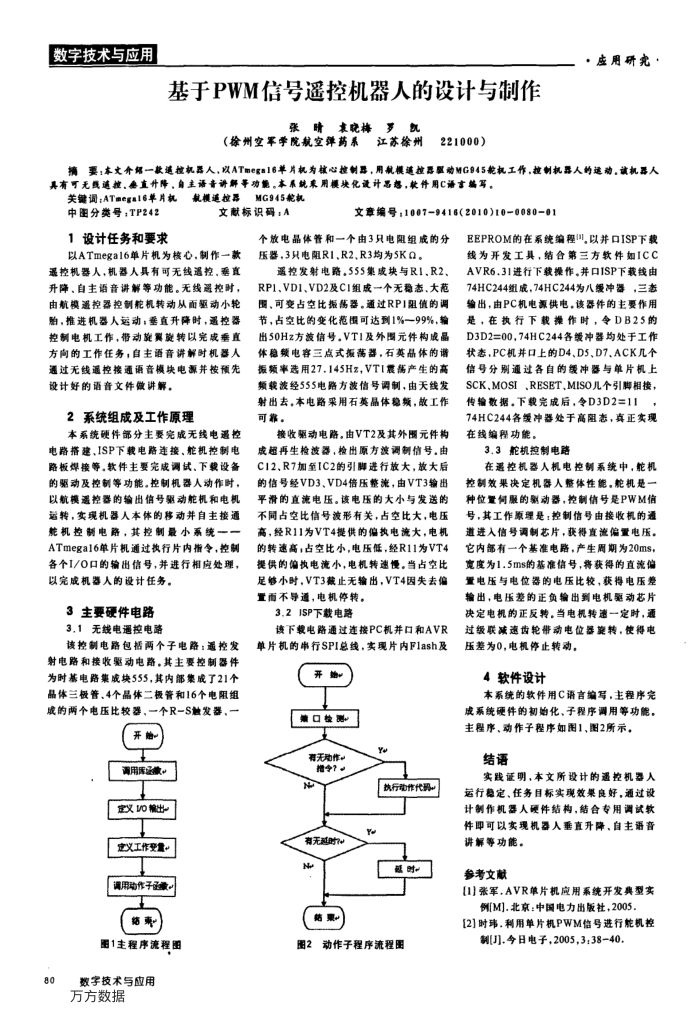
ͼ2�����ӳ�������ͼ
EEPROM����ϵͳ���"���Բ���ISP����Ϊ�������ߣ���ϵ�����������ICC AVR6.31�������ز���������ISP�������� 74HC244��ɣ�74HC244Ϊ�˻�����
ÿ����̬
�������PC����Դ���磬����������Ҫ�����ǣ���ִ�����ز���ʱ����DB25�� D3D2=00��74HC244�������������ڹ���״̬��PC�������ϵ�D4��D5��D7��ACK�����źŷֱ�ͨ�����ԵĻ������뵥Ƭ���� SCK��MOSIRESET��MISO����������ӣ��������ݣ�������ɺ���D3D2=11
74HC244�����������ڸ���־������ʵ�����߱�̹��ܡ�
3.3�ܻ����Ƶ�·
��ң�ػ����˻������ϵͳ�У��ܻ�����Ч�������������������ܡ��ܻ���һ��λ�úη���Ӱ�����������ź���PWMֵ�ţ��乤��ԭ���ǣ������ź��ɽ��ջ���ͨ�������źŵ���оƬ�����ֱ��ƫ�õ�ѹ�����ڲ���һ������·����������Ϊ20ms������Ϊ1.5ms�Ļ��źţ�����õ�ֱ��ƫ�õ�ѹ���λ���ĵ�ѹ�Ƚϣ���õ�ѹ���������ѹ����������������оƬ�������������ת�������ת��һ��ʱ��ͨ���������ٳ��ִ�����λ����ת��ʹ�õ�ѹ��Ϊ0�����ֹͣת����
4�������
��ϵͳ��������C���Ա�д�����������ϵͳӲ���ij�ʼ�����ӳ�����õȹ��ܣ����������ӳ�����ͼ1��ͼ2��ʾ��
����
ʵ��֤������������Ƶ���ػ����������ȶ�������Ŀ��ʵ��Ч�����ã�ͨ���������������Ӳ���ṹ�����ר�õ�������ӡ����ʵ�ֻ����˴�ֱ��������������
����ȹ��ܡ��ο�����
[1]�ž�.AVR��Ƭ��Ӧ��ϵͳ��������ʵ
��[M].�������й����������磬2005.
[2]ʱ�⣬���õ�Ƭ��PWM�źŽ����ܻ�����[J].���յ��ӣ�2005,3��3840.