您当前的位置:首页>论文资料>基于语音控制的舞蹈机器人的设计与制作
内容简介
 数事共本与表用
数事共本与表用设计开发
基于语音控制的舞蹈机器人的设计与制作
李从健陈晓峰郑宏宇赵亚国(宁夏大学宁夏银川750021)
摘要:本文主要介绍了基于语资控制的舞路机器人的设计与制作过程。道过对舞陷机器人机械、电气和程序的设计与实境,使机器人完或优美的舞路动作。行走电机采用继电器控制,以AT89S51单片机为中央处理器,实现各种舞路动作,采用语音识别技术实现语音控制。
关键词:舞陷机器人单片机继电器直流电机语音识别
中图分类号:TN242
文献标识码:A
文章编号:1007-9416(2012)05-0117-03
Design andManufacturing ofDancing-robot
Based on Voice Control Li Congjian Chen Xiaofeng Zheng Hongyu Zhao Yaguo
NINGXIA UNIVERSITY750021
Abstract:This article mainly introduces you the processing of the design and manufacturing of smart Dancingrobot. The robot can complete some beautifil dancing movements on the basis of the design and implementation of mechanical, electronic and programming part. We use relays to control the
moving motors and AT89S51 as central processing unit to come true
atrpl the dancing
Keywords:Dancingrobot MCU DCmotor Voice Recognition 1、舞蹈机器人设计内容
随着现代科技的发展,机器人技术已广泛应用于人类社会生活的各个领域。舞蹈机器人具有人类外观特征,兼有技术含量,极受人们喜受。本课题设计内容如下,
(1)机器人的移动方式采用轮式机构。以车轮代替双足,可以大大简化平衡算法的研究,重点设计其它关节的自由度,使其动作更加丰富:
(2)根据系统的工作要求设计电路,力求使系统的性能稳定,同时着力于实现机器人各关节自由度的协调控制:
(3)为机器人设计遥控系统,使其能工作在遥控模式,以最大程度地满足观性和娱乐性的要求;
(4)为机器人设计语音系统,通过语音识别技术,在表演舞踏前,与机器人进行对话,实现语音控制,
(5)根据选定的音乐为机器人编排一套合适的舞姿。 2、舞蹈机器人总体方案设计
2.1机械结构
机械结构的设计必须与机器人所要完成的功能相适应。主要包括移动机构设计、弯腰机构设计、转身机构设计、手臂和头部机构设计,
2.1.1移动机构设计
下腰部电机
图1弯腰机构图
器
上腰部
电机
图2转身机构图
h
technokogy can make the
r
采用两个驱动轮,两个万向轮,万向轮用于平衡。机构简单,容
易制造及装配,能在原地旋转以获得不同的方向。
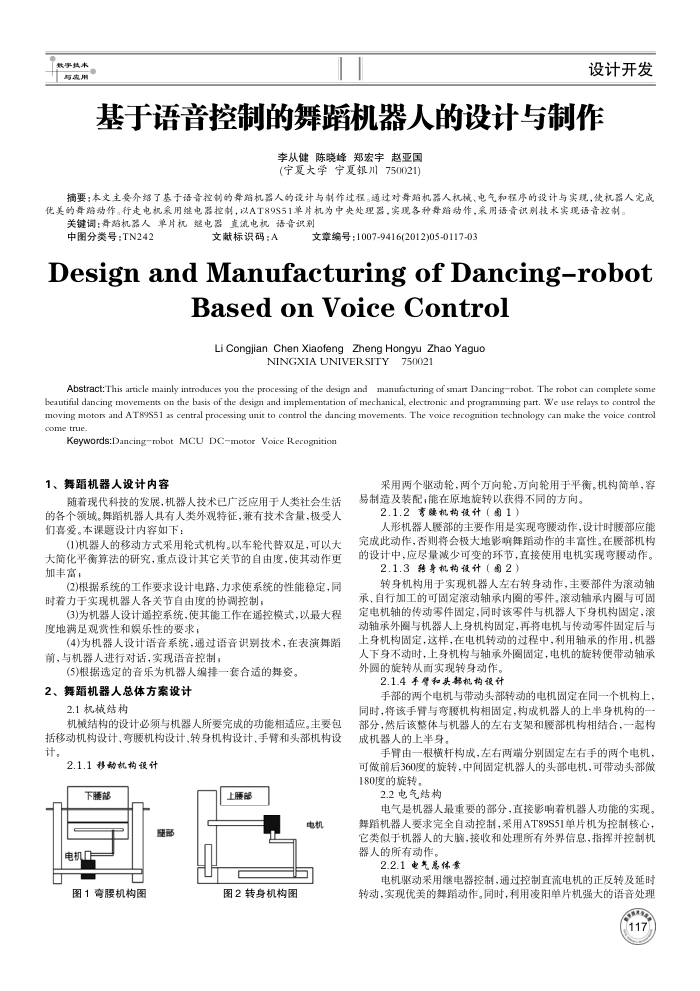
2.1.2言腰机构使计(司1)
人形机器人腰部的主要作用是实现弯腰动作,设计时腰部应能完成此动作,否则将会极大地影响舞蹈动作的丰富性。在腰部机构的设计中,应尽量减少可变的环节,直接使用电机实现弯腰动作。
2.1.3转身机构使计(图2)
转身机构用于实现机器人左右转身动作,主要部件为滚动轴承、自行加工的可固定滚动轴承内圈的零件。滚动轴承内圈与可固定电机轴的传动零件固定,同时该零件与机器人下身机构固定,滚动轴承外圈与机器人上身机构固定,再将电机与传动零件固定后与上身机构固定,这样,在电机转动的过程中,利用轴承的作用,机器人下身不动时,上身机构与轴承外圈固定,电机的旋转便带动轴承外圆的旋转从面实现转身动作。
2.1.4手臂和头部机构设计
手部的两个电机与带动头部转动的电机固定在同一个机构上,同时,将该手臂与弯腰机构相固定,构成机器人的上率身机构的一部分,然后该整体与机器人的左右支架和腰部机构相结合,一起构成机器人的上半身。
手臂由一根横杆构成,左右两端分别固定左右手的两个电机,可做前后360度的旋转,中间固定机器人的头部电机,可带动头部做 180度的旋转
2.2电气转构
电气是机器人最重要的部分,直接影响着机器人功能的实现。舞蹈机器人要求完全自动控制,采用AT89S51单片机为控制核心,它类似于机器人的大脑,接收和处理所有外界信息,指挥并控制机器人的所有动作。
2.2.1电气总体景
电机驱动采用继电器控制,通过控制直流电机的正反转及延时转动,实现优美的舞蹈动作。同时,利用凌阳单片机强大的语音处理
117
上一章:金属腐蚀图像数字处理技术发展综述
下一章:净水器断电后水阀组态的数字控制技术