基于AMAMS∕View六自由度串联机器人运动学仿真
内容简介
 感学技来盗
感学技来盗基于 AMAMSView六
自由度串联机器人运动学仿真
应用研究
王学忠1王鹏1王国明
(1.山东省特种设备检验研究院滨州分院山东滨州256600;2.滨州学院自动化系山东滨州256600)
摘要:采用ADAMS建立机器人的适动学模型,设定一直线为机器人末端执行署的行走执速,通过在ADAMS环境下添加约束和运动,完成机器人的运动学仿真。调用独立的后处理模块ADAMS/PostProcessor,获得机器人的各种运行曲线。
关键调:ADAMS机器人轨速多义线中图分类号:TH112
文献标识码:A
文章编号:1007-9416(2012)02-0071-02
机器人是一个多自由度的高精度空间运动机械,它由一系列杆件通过旋转关节或移动关节连接起来的开式运动链,这使得机器人运动学分析变得十分复杂,机器人上各关节的转动角度、角速度,角加速度等随时间的变化不是一般机构分析方法能够解决的,必须要针对其采用特殊的运动学分析方法",运动学研究的主要途径是采用计算机辅助法建立和求解机器人机构的运动学模型
机器人运动学主要研究两个方面的间题:(1)已知机器人各杆件尺寸和关节变量,求末端执行器相对于给定的世界坐标系的位置和位姿。(2)已知机器人各杆件的尺寸,给定机器人末端执行器相对
于世界坐标系的位置和姿态,确定机器人各关节的转动角度。 1、总体尺寸分析
文中机器人由6个转动关节组成,机器人包括底座、大臂、小臂和晚部等部分。第一个关节(腰关节)在底座和转塔之间,第二个关节(肩关节)在转塔和大臂之间,尺寸参数如图1所示。
0
+
图1机器人总体尺寸
2、ADAMS/VieW环境下机器人运动学仿真
本文所解决的机器人的运动学问题是:已知系统必要的运动(拟定机器人所要做的运动轨迹),通过运动学分析,计算与已知运动有关的运动链各杆件的位移、速度、加速度等。
本文要求机器人末端在空间的行走轨迹为一直线,设定直线在基坐标系中的起点为A(1035,0,1120),终点为B(700,-500,600)。
2.1ADAMS/View环境下直线轨选运动学仿真的步骤 2.1.1创建直线返动的就选
在ADAMS几何建模工具栏中选择绘制直线和多义线②图标,绘制一条起点为A(1035,0,1120),终点为B(700,-500,600)的直线轨迹,如图2所示。
2.1.2添加的来
选择固定副图标,将直线轨迹AB与机架固结在一起,如图2所示。从连接工其栏选择PTCV约束图标,其类型选择为Edge,使得机器人末端运行过程中始终约束在直线AB上。
万方数据
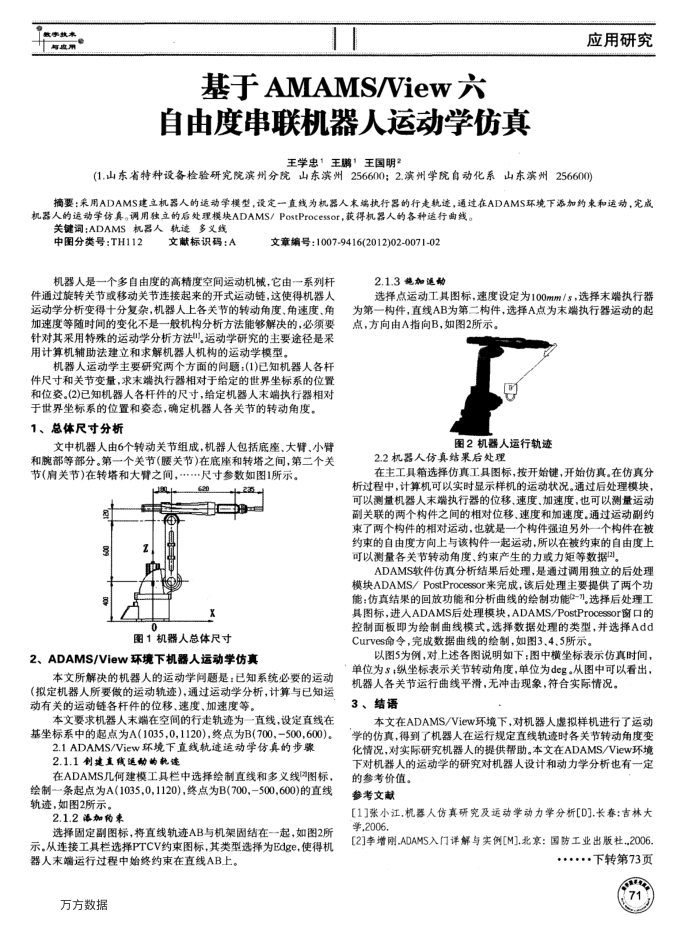
2.1.3镜加通动
选择点运动工具图标,速度设定为100mm/s,选择末端执行器为第一构件,直线AB为第二构件,选择A点为末端执行器运动的起点,方向由A指向B,如图2所示。
图2机器人运行轨迹
2.2机器人仿真结果后处理
在主工具箱选择仿真工具图标,按开始键,开始仿真。在仿真分析过程中,计算机可以实时显示样机的运动状况。通过后处理模块,可以测量机器人末端执行器的位移、速度、加速度,也可以测量运动副关联的两个构件之间的相对位移、速度和加速度。通过运动副约束了两个构件的相对运动,也就是一个构件强迫另外一个构件在被约束的自由度方向上与该构件一起运动,所以在被约束的自由度上可以测量各关节转动角度、约束产生的力或力矩等数据2
ADAMS软件仿真分析结果后处理,是通过调用独立的后处理模块ADAMS/PostProcessor来完成,该后处理主要提供了两个功能:仿真结果的回放功能和分析曲线的绘制功能2-)选择后处理工具图标,进人ADAMS后处理模块,ADAMS/PostProcessor窗口的控制面板即为绘制曲线模式。选择数据处理的类型,并选择Add Curves命令,完成数据曲线的绘制,如图3,4,5所示。
以图5为例,对上述各图说明如下:图中横坐标表示仿真时间,单位为S;纵坐标表示关节转动角度,单位为deg。从图中可以看出,
机器人各关节运行曲线平滑,无冲击现象,符合实际情况。 3、结语
本文在ADAMS/VieW环境下,对机器人虚拟样机进行了运动学的仿真,得到了机器人在运行规定直线轨遗时各关节转动角度变化情况,对实际研究机器人的提供帮助。本文在ADAMS/View环境下对机器人的运动学的研究对机器人设计和动力学分析也有一定
的参考价值。参考文献
[1]张小江,机器人仿真研究及运动学动力学分析[D].长春吉林大学,2006.
[2]李增刚.ADAMS入门评解与实例[M].北京:国防工业出版社.,2006.
.下转第73页