����5VS5�������������������ز������
���ݼ��
 ѧ����̳
ѧ����̳���¼��� E��
����5VS5�������������������ز������
�������ƺ���������﴿��(�����ʵ��ѧ�Զ���ѧԺ����4(0065)
ժҪ������ͨ����5VS5����������������з��ز��Ժͽ���·�ߵķ�������֪���ַ����������ʷ�������Դ˽��ۣ������һ�ֻ�������Ա�����������ػ�����Э������������ģ�����Է��в��ԣ��ﵽ�Ϻõķ���Ч����
�ؼ��ʣ��������������Ƿ������ֲ���
���ױ�ʶ�룺A
��ͼ����ţ�TP242 1������
���±�ţ�1007-9416(2011)10-0172-02
3���ط�������صIJ������
�����������������Ƕ���ʵ���������һ��ģ�⣬��֧��ӵ�ǿ������ִ�г�����������л����˵Ľ����ͷ��ز��Եij��������Ϊ�ؼ����õĽ������Կ���ߵ÷�Ч�ʣ�������ķ��ز��Լȿ������ƶԷ��÷ֵ�ͬʱ��������߱����Ľ���Ч�ʡ��������ܽ������з����㷨��ȱ��Ļ����ϣ�������ֻ���������صķ��ز��ԣ�������ǿ����ص�����Ժ�ȷ�ԣ�������ǿ�˱��ӵ�ʵ����
2�����з��ز�·�ķ���
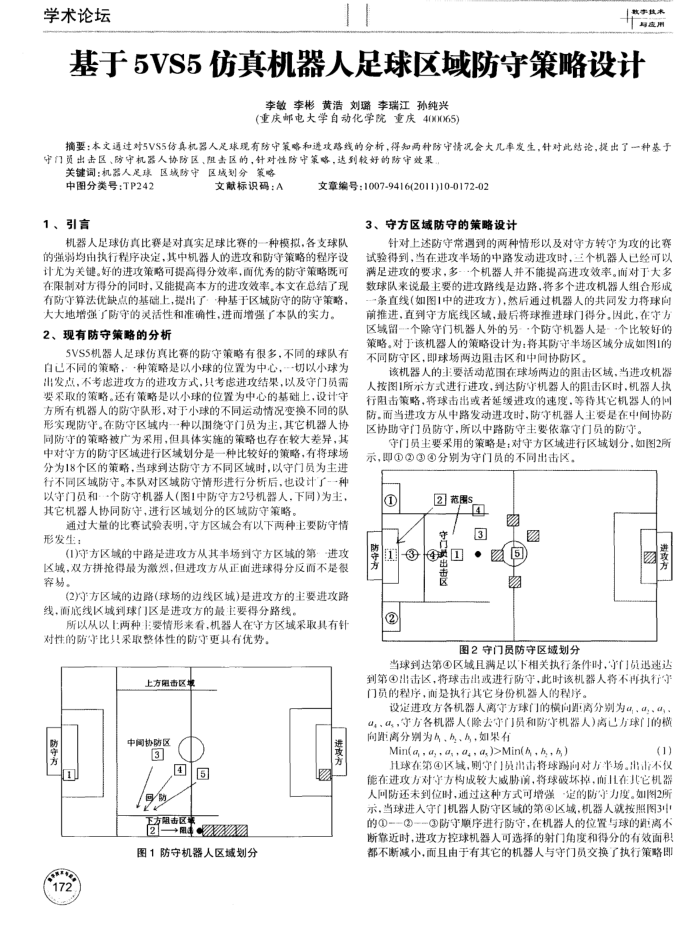
5VS5������������������ķ��ز����кܶ࣬��ͬ����������Ѳ�ͬ�IJ��ԣ�-�ֲ�������С���λ��Ϊ���ģ�--����С��Ϊ�����㣬�������������Ľ�����ʽ��ֻ���ǽ���������Լ�����Ա��Ҫ��ȡ�IJ��ԡ����в�������С���λ��Ϊ���ĵĻ����ϣ�����ط����л����˵ķ��ض��Σ�����С��IJ�ͬ�˶�����任��ͬ�Ķ���ʵ�ַ��ء��ڷ���������һ����Χ������ԱΪ��������������Эͬ���صIJ��Ա���Ϊ���ã�������ʵʩ�IJ�·Ҳ���ڽϴ���죬���ж��귽�ķ����������������һ�ֱȽϺõIJ��ԣ��н���Ϊ18�����IJ��ԣ�������ط���ͬ����ʱ��������ԱΪ�����в�ͬ������ء����Ӷ�����������ν��з�����Ҳ�����-һ��������Ա�����ػ�����(ͼ1�з��ط�2�Ż����ˣ���ͬ)Ϊ��������������Эͬ���أ��������ֵ�������ز��ԡ�
ͨ�������ı�������������ط������������������Ҫ�������η�����
(1)�ط��������·�ǽ����������ʳ����ط�����ĵڣ�-��������˫��ƴ������Ϊ���ң������������������÷ַ��治�Ǻ����ס�
(2)������ı�·(�ı�������)�ǽ���������Ҫ����·�ߣ�����������������ǽ�����������Ҫ�÷�·�ߡ�
���Դ�����������Ҫ�������������������ط������ȡ��������Եķ��ر�ֻ��ȡ�����Եķ��ظ��������ơ�
�Ϸ���������
��ѧ��
�з�Э����
ͼ��
4
�·�������
2
5
��
ͼ1���ػ��������ǻ���
����������س����������������Լ����ط�ת��Ϊ���ı�������õ������ڽ����볡����·��������ʱ�������������Ѿ��������������Ҫ��������˲�������߽���Ч�ʡ������ڴ���������˵����Ҫ�Ľ���·���DZ�·���������������������γ�һ��ֱ�ߣ���ͼ1�еĽ���������Ȼ��ͨ�������˵Ĺ�ͬ����������ǰ�ƽ���ֱ���ط���������������ƽ����ŵ÷֡���ˣ����ط�������--�������Ż����������-�������ػ�������--���ȽϺõIJ��ԡ����ڸû����˵IJ������Ϊ��������ذ볡����ֳ���ͼ1�IJ�ͬ���������������������������Э������
�û����˵���Ҫ���Χ�������ߵ�����������������˰���ͼ1��ʾ��ʽ���н���������������˵������ʱ��������ִ��������ԣ�������������ӻ��������ٶȣ��ȴ����������˵Ļط�����������������·��������ʱ�����ػ�������Ҫ�����м�Э����Э������Ա������������·������Ҫ��������Ա�ķ��ء�
����Ա��Ҫ���õIJ����ǣ����ط�����������֣���ͼ2��ʾ�����٢ڷֱ�Ϊ����Ա�IJ�ͬ��������
��
���ط�
��
��
ͼ��ΧS
4
�Żس�����
ͼ��
��ͬ
ͼ2����Ա��������
����ڢ�������������������ִ������ʱ������ԱѸ�ٴ�
���ڢٳ������������������з��أ���ʱ�û����˽�����ִ������Ա�ij�����ִ���������ݻ����˵ij���
�趨�����������������ط����ŵĺ������ֱ�Ϊ��6����6�� �����������ط��������ˣ���ȥ����Ա�ͷ��������ˣ����ѷ����ŵ�ģ�����ֱ�Ϊ�룬Ϊ���룬�����
Min(a,, d, , d, ,, a,)>Min(h,h,,b)
(1)
H���ڵڢ����ǣ�������1Աɽ�н�����Է��볡�������������ڽ������Է����ɽϴ���вǰ�������ƻ���������������������ͬ����δ��λʱ��ͨ�����ַ�ʽ����ǿ-���ķ�"�����ȡ���ͼ2��ʾ������������Ż����˷�������ĵڢ��������˾Ͱ���ͼ3 �Ģ�һ��һһ�۷���˳����з��أ��ڻ����˵�λ������ľ��벻�Ͽ���ʱ����������������˿�ѡ������ŽǶȺ͵÷ֵ���Ч��������ϼ�С�����������������Ļ�����������Ա������ִ�в��Լ�