您当前的位置:首页>论文资料>汽车四轮转向应用自抗扰控制技术研究
内容简介
 事共来与表用
事共来与表用数控技术
汽车四轮转向应用自抗扰控制技术研究
吴增斌
(中国北方车辆研完所北京100072)
摘要:四轮转向汽车相对于通常的前轮转向汽车有着很多优异的性能。四轮转向汽车前后轮转角的控制是该额域研究的一个重点。尝试将白抗抗控制技水引入到汽车四轮转向研究当中。设计了造用于四轮转向汽车的自抗抗控制器,通过运行自抗抗控制应用于四轮转向汽车MATLAB/ Simulink仿真模型并对比前馈控制的控制效果,认为自抗扰控制应用于四轮转向当中是可行的。并且自抗扰控制技术有着较好的遗应能力及抗干扰能力。自抗抗控制需要确定的参数较多,缺乏参数整定方法,增加了调试的围难
关键调:自抗扰控制四轮转向汽车前馈控制
中图分类号:TP391.9 1引言
文献标识码:A
汽车四轮转向技术能够有效地提高车辆的操纵稳定性,是实现车辆主动安全的重要方法之一。通常汽车只是前轮转向,后轮通过车身带动被动地参与到车辆的转向过程中,四轮转向(4WS)是指不仅车辆的前轮转向,同时后轮也通过主动的偏转一定角度参与到转向过程中。四轮转向汽车在低速时前后车轮转角相反,能够缩小车辆的转弯半径,使操纵更加轻便以及增加通过性,更为重要的是四轮转向汽车能够使得质心创偏角基本为零,极大地改善横摆角速度和侧向加速度的瞬态性能指标,
四轮转向汽车前后轮转角之间的关系是这个领域中研究的重要的问题。在现有的四轮转向研究中,前轮转角一般由驾驶员通过转动转向盘并通过前轮与转向盘之间的机械连接来实现,后轮转向通过控制策略,由前轮转角、车速等参数确定。本文尝试将自抗扰控
o
图1四轮转向汽车二自由度模型
v=10m/s
文章编号:1007-9416(2014)02-0005-03
制技术(ADRC)引人到汽车四轮转向技术中,并与控制目标为质心侧偏角为零的前后轮转角前馈控制作对比,探讨自抗扰控制技术应
用于四轮转向中的可行性,分析自抗扰控制技术应用的特点。 2四轮转向汽车二自由度模型及前馈控制
2.1四轮转向汽车二自由度模型
经过简化得到的线性二自由度汽车模型能够基本体现出操纵稳定性的基本特性。图1是四轮转向汽车二自由度模型运动学参数及受力情况,由此可推导出四轮转向汽车的二自由度模型,见式(1)。
mvp+(ca,+Caa)β+(mv*Caw/g+Ca,l)兰=Ca,&,+Ca,8m J(β+(+)a
(1
控的标
Cya bet
自抗抗控制器
猫范转 a 整作治
Scope2
deltahpndo
四轮转其汽军二房山度模型
Scope
图2自抗扰控制应用于四轮转向汽车
MATLAB/Simulink仿真模型
14 0
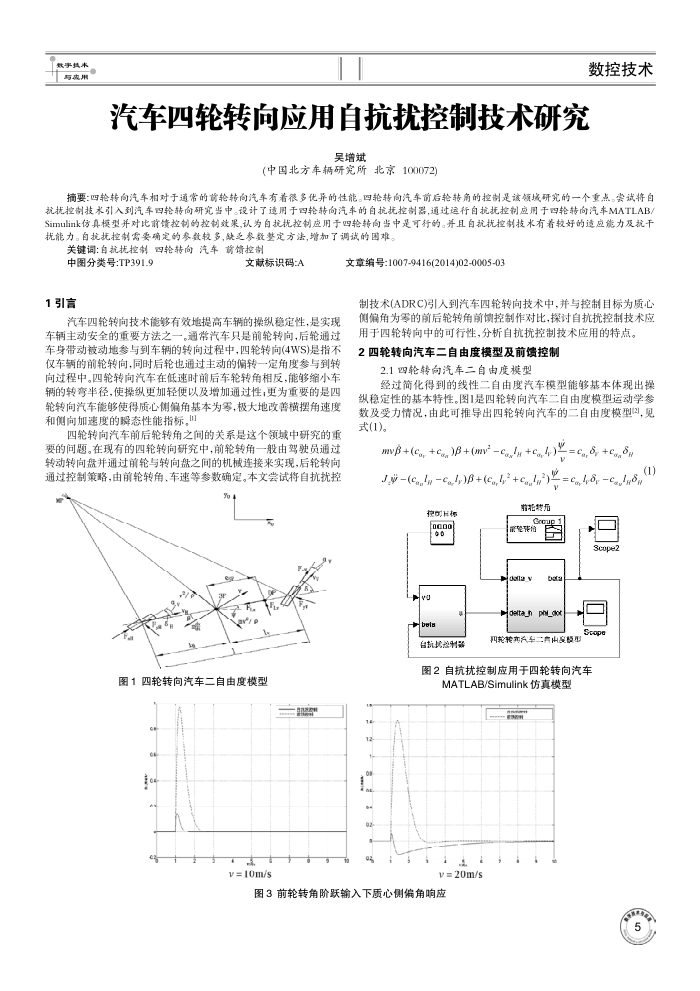
v=20m/s
图3前轮转角阶跃输入下质心侧编角响应
上一章:现代电子技术在汽车制造中的应用
下一章:纯电动汽车用VRLA蓄电池的研发