您当前的位置:首页>论文资料>基于线性自抗扰技术的船舶编队控制算法研究
内容简介
 算法分析
算法分析数事执本与或用
基于线性自抗扰技术的船舶编队控制算法研究
江锋卡鸿巍
(海军工程大学电气工程学院湖北武汉430033)
摘要:针对船赖端队控制同题,首先设计了基于线性自抗扰LADRC的航连控制器对航行中的船舶航避进行控制。LADRC航连控制器由线性扩张状态观测器LESO和比例微PD分控制环节组成。在此基础上,采用领航者一跟随者法建立了编风运动数学模型,采用LADRC航进控制器进行船舶端队控制。仿真结累表明,本文方法能精确跟踪领航船分配的航进指令完成编队队形保持。该方法响应速度快,超调量小,具有较强适应性和鲁棒性。
关键词:船舶编队编队控制线性自抗扰队形保持
中图分类号:TP273
文献标识码:A
近年来,由于航海导航、控制、通讯等技术的迅猛发展,编队控制在船舶运动控制领域引起了广泛关注-。国内外学者针对编队控制问题展开了大量的研究并提出了多种编队队形控制方法,主要包括基于行为法、拟结构法、分布式控制法、领航者法(L一F法)等川文献[4]针对无人机的“长机一像机"编队建立了编队飞行的线性化数学模型,采用经典的PID控制技术设计了缩队队形保持变换的控制器,实现了稳定地队形保持功能。但没有考虑到被控对象或外部环境的变化对控制器鲁棒性的影响。为提高缩队队形控制器的稳定性,肖亚辉等人设计了基于模糊PID的无人机编队控制器,实现了自适应控制。PID控制器的积分反馈会使闭环系统反应钝并产生囊荡和稳态误差,同时微分环节对高频噪声具有放大作用,因此,系统容易受到传感器误差以及各类外部干扰的影响,导致控制器的性能大大降低。
本文借鉴自抗干扰LADRC技术的思想设计了船舶编队控制器。采用线性扩张状态观测器LESO将编队系统内外部扰动的总和作为状态量进行估计,它不需要其准确的数学模型,避免P加D中积分环节的缺陷,以LESO反馈的误差量估计值作为PD控制器的输入来控制船舶航迹,同时建立了基于领航者法的船舶编队运动模型,采
用本文的航机控制器实现了编队队形保持。 1船舶编队运功模型
对于有n艘船舶组成的编队,为了能够运用领航者法(以下简称 LF法)建立船舶编队控制数学模型,给出船舶编队中第艘船舶的运动学和动力学模型如下,
[, =u, cosw, y, sinw j, =w, siny, +v, cosw, w,=r
m, m,V,, + du, = T. M2a,, m,1,4,r; + d22/V, = 0
[mv (m m]u,V, + d/', = T,
(1)
其中,、J和分别表示第艘船舶的X-Y平面位置和方向;4、寸和分别表示第艘船的纵向递度,横向递度和崩播角速度;照、 m.和m分别表示第艘船的惯性和附加质量;d.、d和d分别表示船舶在纵向、横向和播角方向上的水动力阻尼,纵向控制力 7。和崩播力矩t,为欠驱动船舶的仅有的两个控制输入
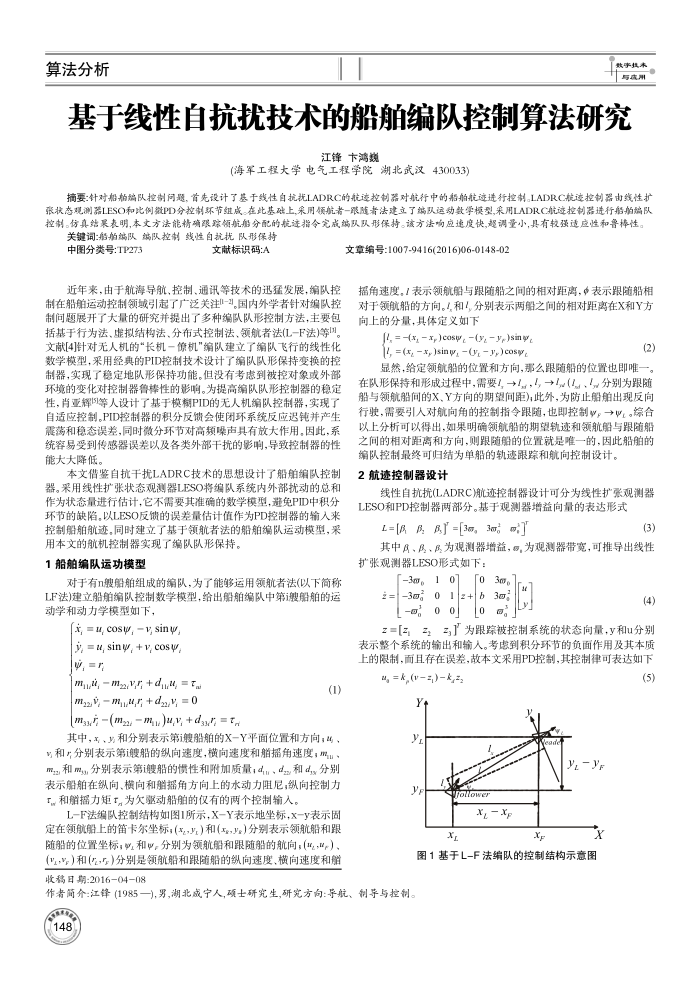
L-一F法编队控制结构如图1所示,X-Y表示地坐标,X一Y表示固定在领航船上的笛卡尔坐标;(2J)和()分别表示领航船和跟随船的位置坐标;,和。分别为领航船和跟随船的航向,(,,)()和(,5)分别是领航船和跟随船的纵向速度、横向速度和崩收稿日期:201604-08
文章编号:1007-9416(2016)06-0148-02
播角速度。!表示领航船与跟随船之闻的相对距离,表示跟随船相对于领航船的方间。和1分别表示两船之间的相对距离在X和Y方向上的分量,具体定义如下
[, = (x, x,)eosw (y, yr)sin,
[, =(x, xy)siny, (, J,)cosy
(2)
显然,给定领航船的位置和方向,那么跟随船的位置也即唯一在队形保持和形成过程中,需要,→,,→1(1、“分别为跟随船与领航船间的X,Y方向的期望间距)此外,为防止船舶出现反向行驶,需要引人对航向角的控制指令跟随,也即控制。→。综合以上分析可以得出,如果明确领航船的期望轨速和领航船与跟随船之间的相对距离和方向,则跟随船的位置就是唯一的,因此船舶的
编队控制最终可归结为单船的轨速跟踪和航向控制设计, 2航迹控制器设计
线性自抗扰(LADRC)航迹控制器设计可分为线性扩需观测器 LESO和PD控制器两部分。基于观测器增益向量的表达形式
L=[β=[3,3,
(3)
其中A、员、民为观测器增益,,为观测器带宽,可推导出线性扩张观测器LESO形式如下:
3。
[30。1
0
0
a
2=30 0 12+6 30;
[ooo
(4)
z=[zz,z,了为跟踪被控制系统的状态向量,y和u分别表示鉴个系统的输出和输人。考虑到积分环节的负面作用及其本质上的限制,面且存在误差,故本文采用PD控制,其控制律可表达如下
, = k, (v2,) k,2,
Y+ y
y
follower
X, xp
Xp
y-yp
X
图1基于L-F法编队的控制结构示意图
作者简介:江锋(1985一),男,湖北成宁人,颈士研究生,研究方向:导航、制导与控制。 148
(5)
上一章:船舶电力保护系统的智能监测技术
下一章:改进的形状上下文在舰船图像匹配中的应用