基于S7-200﹢PLC与步进电机的位置控制系统设计
内容简介
 精密制造与自动化
精密制造与自动化2016年第4期
基于S7-200PLC与步进电机的位置控制系统设计
谷纪广1唐明媚2
(1.新地能源工程技术有限公司河北廊坊065001:
2.北华航天工业学院河北廊坊065000)
摘要设计了一套基于S7-200PLC的步进电机位置控制系统,由软件和硬件两部分组成。使用PLC高速脉冲输出功能,控制步进电机运动。旋转编码器作为系统的检测元件,其输出脉冲信号反馈到PLC,利用PLC的高速计数功能,实现位置的半闭环控制。
关键词PLC步进电机步进电机驱动器
导脉冲编码器
步进电机是将电脉冲转化为角位移的执行机构,专门用于位置和速度精确控制,其结构简单,运行可靠,具有反应速度快、运转噪音低、控制性能好、整机成本低等优点,广泛应用于机械、电子、纺织等行业。
步进电机驱动器,用于放大控制信号,驱动步
进电机,带动负载,步进电机系统的性能很大程度上取决于步进电机驱动器。
旋转编码器是一种光电式旋转测量装置,它将被测的角位移直接转换成数字信号(高速脉冲信号)。此信号输入给PLC,利用PLC的高速计数器进行计数:以获得测量结果
典型的步进电机控制系统一般由三部分组成步进电机控制器、步进电机驱动器以及步进电机。但当步进电机启动频率过高或负载过大时,易出现丢步现象,停止时转速过高易出现过冲现象,所以为保证其控制精度,往往加入反馈环节组成高性能的闭环、半闭环控制系统。本文采用旋转编码器作
为位置反馈器件,使其控制性能更为可靠。 1步进电机控制系统总体结构
本系统采用半闭环结构,总体结构如图1所示。程序在PC机上编写并调试,然后再下载到PLC。
PC机 42
万方数据
PLC 控制器
步进电机驱动器
旋转缩码器一
图1系统总体结构框图
步进
传动
电机机构
步进电机控制系统硬件设计 2
2.1硬件选型
系统选用西门子公司的S7-200PLC,CPU224,直流供电,直流输入,PNP晶体管输出,是一款紧凌高性能的CPU,带有24个输入输出点。带有6 个30kHz的高速计数器,2个20kHz高速脉冲输出,满足系统的要求。
步进电机为两相四线混合式步进电机,型号为 57BYG。红绿、黄蓝分别为电机的A、B两相。
驱动器为THB7128-3型,此驱动器为低功耗 3A的步进电机驱动器,工作电压为10~32V(本系统接入24V),适合57电机,性能优越。电流设定方法为拨码开关分档可调,板子背面印有参数设定表格,方便调节。有细分功能,细分数也用驱动板上的拨码开关选择设定。
旋转编码器为电压24V的光电编码器,有黑、红、黄、白四根接线,两根电源线,两根信号线,
输出脉冲相位差为90°。 2.2硬件接线
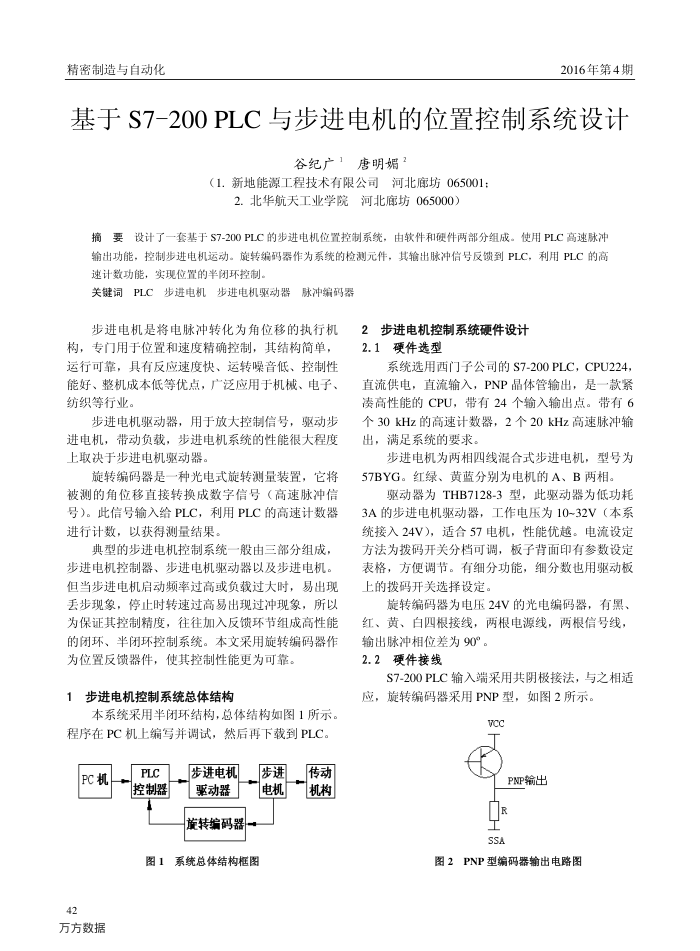
S7-200PLC输入端采用共阴极接法,与之相适应,旋转编码器采用PNP型,如图2所示。
VCC
PNP输出
R 工 SSA
图2PNP型编码器输出电路图
上一章:基于无差拍直接转矩控制永磁同步电机的研究
下一章:基于实验设计方法的产品质量改善