����ǰ��λ�ã���ҳ>��������>����PLC���Ʋ�������ϵͳ������о�
����PLC���Ʋ�������ϵͳ������о�
���ݼ��
 ���¹�������
���¹����������ؼ���
����PLC���Ʋ�������ϵͳ������о�
�±������Ǿ�
(����ƴ�ְҵѧԺ����402160)
ժҪ�����Ļ���PLC�������������˵�ϵͳ���Ϊ�о�����,�ﵽ�������ҵ����Ч�ʵ�Ŀ�ġ���Ҫ���ٻ�����ϵͳ�����ԭ������ܽṹ��ʵ�ַ�����ͬʱҲ�ص��о�PLC����ϵͳ�����,���PLC���ƵIJ������̡�ϵͳ�ӿںͿ���ϵͳ���ܷ��䷽����ͨ��ģ��ܲ���,��PLCΪ����ϵͳ�Ļ�����ִ��ָ��ȷ��Ϲ�ҵ��ˮ�����������Ҫ��ʵ�ֻ����˴����˹������Բ�Ʒ���װ�书�ܡ�
�ؼ�����������PLC����ϵͳ�ӿ���Ʋ�������
��ͼ����ţ�TP2 1����
���ױ�ʶ�룺A
���±�ţ�1007-9416(2014)03-0007-02
PLC����ϵͳ�����б�̣�ʹ�������ڹ����������ܹ�ִ��Ԥ���趨�ij������ô�����ʶ����״̬���мӹ��������Զ��ص�����
���ŵ��ӻ�е�ӹ�ҵ��Ѹ�ͷ�չ����ҵ�ѹ㷺ʹ��������ˮ�ߣ�ʹ�������켼������ظ�����װ�乤�������������˹��ɱ��������ߣ���ҵ�й�Խ��Խ���ѣ������ɱ������߲�������Լ��ҵ�ķ�չ�������ظ��Բ����ĸ�λ��ʹ�ù�ҵ�����˴����˹�������Ϊ��Ȼ���ơ���ҵ�ڲ�����װ������˿ɴ���������Ч�ʺͿɿ��ԣ�������Ϊ���ص��²�ƷƷ�ʵIJ��ȶ��������������������˾���ʮ�ֹ㷺��Ӧ��ǰ¼����ҵ��Ҫ��ɲ��ӹ������˵���ƺͻ����˵��Զ�����ϵͳ����ƺ���ʹ�û���������Զ�װ�䡣������ʵ���Զ��������漰����������㡢���������Զ����Ƶ�רҵ֪ʶ��Ŀǰ����Ҫ���ü���������ʹ��Զ����Ƽ������ϵ�
E
X�ᴫ���� Y�ᴫ���� Z�ᴫ����
��λ�����ƽӿ�
PLC ������
״־��ʾ�ӿ�
X�������� Y��������
Z���¶���
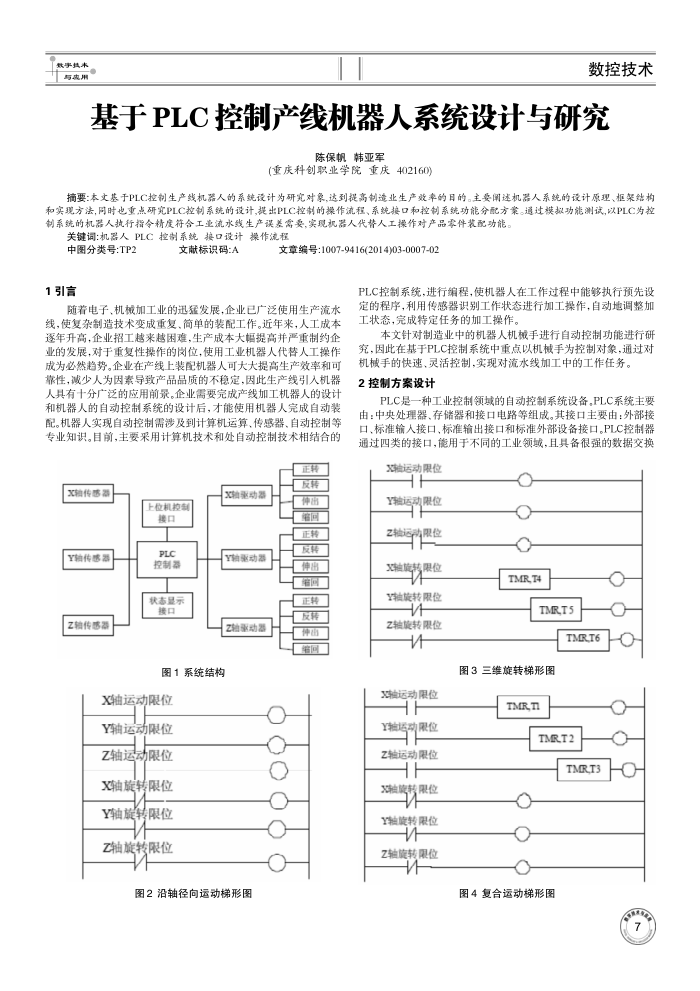
ͼ1ϵͳ�ṹ
X���˶���λ
Y���˶���λ Z���˶���λ X����ת��λ Y����ת��λ Z����ת��λ
ͼ2���ᾶ���˶�����ͼ
O O O
��
����
��״̬������ض�����ļӹ�������
�����������ҵ�еĻ����˻�е�ֽ����Զ����ƹ��ܽ����о�������ڻ���PLC����ϵͳ���ص��Ի�е��Ϊ���ƶ���ͨ����
��е�ֵĿ��١������ƣ�ʵ�ֶ���ˮ�ӹ��еĹ������� 2���Ʒ������
PLC��һ�ֹ�ҵ����������Զ�����ϵͳ�豸��PLCϵͳ��Ҫ�ɣ����봦�������洢���ͽӿڵ�·����ɡ���ӿ���Ҫ�ɣ��ⲿ�ӿڡ������˽ӿڡ�������ӿںͱ��ⲿ�豸�ӿڡ�PLC������ͨ������Ľӿڣ������ڲ�ͬ�Ĺ�ҵ�����Ҿ߱���ǿ�����ݽ���
���˶���λ Y���˶���λ Z���˶���λ
X��ʩת��λ���ת��λ Z����ת��λ
X���˶���λ Y���˶���λ Z���˶���λ��ħת��λ Y����ת��λ Z����ת��λ
TMR,T4
O
TMRT5
TMRT6
ͼ3��ά��ת����ͼ
TMR,n
TMRT2
TMRT3
ͼ4�����˶�����ͼ