您当前的位置:首页>论文资料>重力MWD技术在国外的应用
内容简介
 技术管理
技术管理重力MWD技术在国外的应用
徐占超
胜利油田钻井工程技术公司定向井公司
摘要:MWD/LWD在定向钻并中越来超显示出其优超性。但是,常规MWD/LWD是一种磁力测斜仪,在掌近磁性干扰源附近时就会出现较大的误差。国外现在出现了一种新型的重力随钻洲解(GMWD)工具,它能够在磁性环境下比较准确地获取井限轨连参数。这种技术结合重力测量方住角的原理,分析了重力 MWD的方位角测量技术和作业中的关健影响因素,该技术在应用中表明,重力MWD能避免避场干扰,测得的方住角精度较高。
关键词:重力MWD:大地硅场:重力场;方住角:W1Z井
常规MWD/LWD是磁性测量工具,是通过大地磁场来测量方位角的。在开窗侧钻和套管钻并等作业中,制品等的磁力干扰源对测量仪器产生较大的影响,给并眼轨速预测和控制带来困难,为避免测量过程中磁场的干扰,美国PathFinde能源公司研制出了重力随钻测斜仪,即重力MWD。它是在常规MWD/LWD上装置了一套三轴加速度传感器取代传统的磁力传感器,通过两组加速度计之间钻柱固有弯曲来测量方位角的相对变化,从而确定测量位置处的轨迹参数。
,重力MWD测方位角技术
1.MWD/LWD测量方位角的原理
常规MWD/LWD是以磁力仪作为测量方位角的主要传感器,使用单个三轴磁力仪测量地球磁场的各个分量,从而获取并眼方位角。磁场分量如图1所示,图中1表示地磁倾角,H表示感场的强度,Hx,Hy和Hz是并简磁场H在x,和轴上的分量,G表示重力方向。
水面
东
北
H
+G
图1磁力仪在井简中的各磁场分量示章
由磁力传感器的磁场分量和相关重力分量,得MWD/LWD在用磁力传感器测量井眼方位角和感性工具面角的表达式:
α=arctan[G(H,H,H,G,)/[H(G°,+G′,)+H,G,G,+H,G,G.] βm=arectanH/H,
(1)(2)
式中,a为并眼的方位角,(°),βm为性工具面角,(°),G. G,G.为并简重力场沿x,y、z轴的重力分量,m/s。
在确定情况下,重力保持不变。在强场干扰的环境中,通过磁力传感器的磁通量就不仅仅是大地磁场,还有外部干扰感场
38
2014年12月
的选加,这给测量带来误差,进而给并眼轨迹的判断或修正带来障碍。
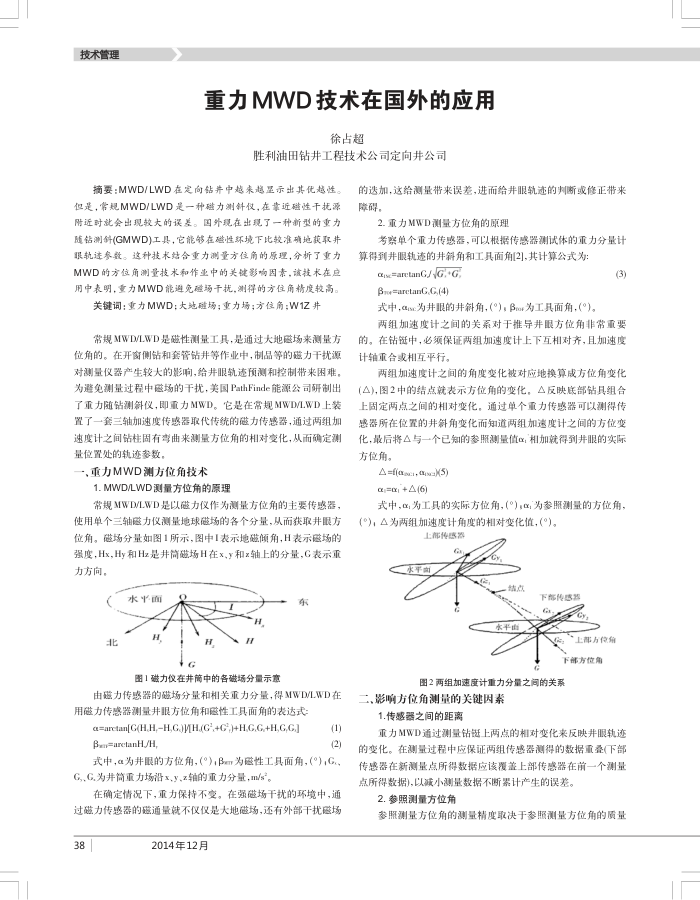
2.重力MWD测量方位角的原理
考察单个重力传感器,可以根据传感器测试体的重力分量计算得到并眼轨速的并斜角和工具面角[2],其计算公式为:
Qc=aretanG/ G;+G, β=aretanG,G,(4
式中,a为井眼的井斜角,(°),β为工具面角,(°)。
(3)
两组加速度计之间的关系对于推导并眼方位角非常重要在钻链中,必须保证两组加速度计上下互相对齐,且加速度
的。
计轴重合或相互平行。
两组加速度计之间的角度变化被对应地换算成方位角变化(△),图2中的结点就表示方位角的变化,△反映底部钻具组合上固定两点之间的相对变化,通过单个重力传感器可以测得传感器所在位置的井斜角变化而知道两组加速度计之间的方位变化,最后将△与一个已知的参照测量值α,相加就得到并眼的实际方位角。
=f(aaci, a)(5) α;= + (6)
式中,α为工具的实际方位角,(°),为参照测量的方位角,(°),△为两组加速度计角度的相对变化值,(°)。
上部传感器
G
水平
续点平
下部传感器
上部方编下部方位角
图2两组加速度计重力分量之间的关系
二、影响方位角测量的关键因素
1.传感器之间的距离
重力MWD通过测量钻链上两点的相对变化来反映并眼轨迹的变化。在测量过程中应保证两组传感器测得的数据重叠(下部传感器在新测量点所得数据应该覆盖上部传感器在前一个测量点所得数据),以减小测量数据不断累计产生的误差。
2.参照测量方位角
参照测量方位角的测量精度取决于参照测量方位角的质量
上一章:有机热载体使用状况分析
下一章:重型车底盘装配线设计