����ǰ��λ�ã���ҳ>��������>���Զ�ѭ�����˳�����ϵͳ�Ŀ���
���Զ�ѭ�����˳�����ϵͳ�Ŀ���
���ݼ��
 ��7�� 2017��7��
��7�� 2017��7����ϻ������Զ����ӹ�����
Modular Machine Tool & Automatic Manufacturing Technique
���±�ţ�10012265(2017)07013304
D0I : 10. 13462/j. cnki. mmtamt. 2017. 07. 032
���Զ�ѭ�����˳�����ϵͳ�Ŀ���
�ž�������գ���ǿ�����Դ�Ž��ǣ��ź��ƣ�ɽ��������ѧ��е����ѧԺ��ɽ���Ͳ�255049��
No.7 Jul.2017
ժҪ��Ϊ��̽������·�������͵����⣬�����˻���Arduino����������ѭ�ܰ��ͳ�����ϵͳ��ϵͳӲ����ϵͳ�����������о���ϵͳӲ������������������Ԫ���ͼ��Ԫ���ȣ�ϵͳ���������ܽ���ֳ�ѭ��ģ�顢��ɫʶ��ģ��ʹ���ͨ��ģ��ȡ�����˲���ArduinoNano�ʹ���ͨ�Ŷ�С�����п��ƣ���ʵ��ѭ��У��������Ѱ�ꡢ�Զ����˵ȹ��ܡ�ͨ���ֳ����ԣ���ϵͳ�ܿ����Զ�����С
��������Ĺ켣�϶Բ�ͬ��ɫ���������ѭ�����ˣ������ݶ�ɫ�IJ�ͬ���������ָ��λ�á��ؼ��ʣ��Զ�ѭ�������˳�������ϵͳ������
��ͼ����ţ�TH166;TG659
���ױ�ʶ�룺A
Development of Control System for Micro Automatic Tracking AGV
ZHANG Jun,ZHAO Yu-gang, YANG Qiang, WANG Xian-da,ZHANG Jin-ye,ZHANG Hai-yun
( School of Mechanical Engineering, Shandong University of Technology , Zibo Shandong 255049, China) Abstract: In order to explore the carry of complex paths and multiple locations, a control system based on Arduino for micro automatic tracking AGV is developed. The hardware includes controllers, driver detectors etc, and the software is divided into tracking module, color recognition module and serial communication module. The Arduino Nano and serial communication are used to control AGV. At last, through the debug-ging, the AGV realizes the function that it can carry the various colors objects and place them in the speci-fied locations on the laying track.
Key words: automatic tracking; AGV; control system; development
0
����
�б�������������еʽ���˵Ĵ�ͳ����װ�ã��������˰��˳���AGV��"�����Ч�����ܡ�����䡢�������ŵ�[23]���ܵ�Խ��Խ�����Ŀ��������ҵ��Ӧ�á����˰��˳�ʼ��1953�꣬����20����50~60����ķ��ٷ�չ���ڵ�����ʽ�Ϸ�Ϊ��ѧ��������ŵ�����������ȣ�����Щ�������ֱ����·������Ⱦ����Ħ����������������ɱ��ߵ�ȱ�㡣���������������о�һ�����͵��Ӿ���������������ʶ�����������ȱ�ݣ���δͶ��Ӧ��[4]���ҹ���1976�꿪ʼ AGV�о�����Ȼ������������������������Ԥ�� 2017��������2016��ͬ�����������ijɣ�����شٽ�����AGV�Ŀ�������[3]
����ϵͳ�ǰ��˳��ĺ��ģ���ϵ�Ű��˳��Ĺ�����ʽ��ʹ��Ч��]���Բֿ�����˻��̶���һ���������[740]��Ϊ̽������·��������������İ������⣬��ϵͳӲ����ϵͳ�������濪�������Զ����˳��Ŀ���ϵͳ�����ݰ��˳��ĸ��ӳ̶ȣ�ϵͳ����Arduino ���ƣ�ͨ���Ե�������Ĺ켣���й�ѧ��������������
����ɫ����������Զ����ಢ���˵���ͬ�ĵص�
�������Զ��˷�ʽ���п��������˲�ͬ��״�ߴ�����壻��ѭ���������п�������Ӧ�ڶ��ֳ��ϣ���ʶ���ܽ��п�����ʵ����ɫ���ߴ硢��״���ϱ��������ʶ��
�������˼·
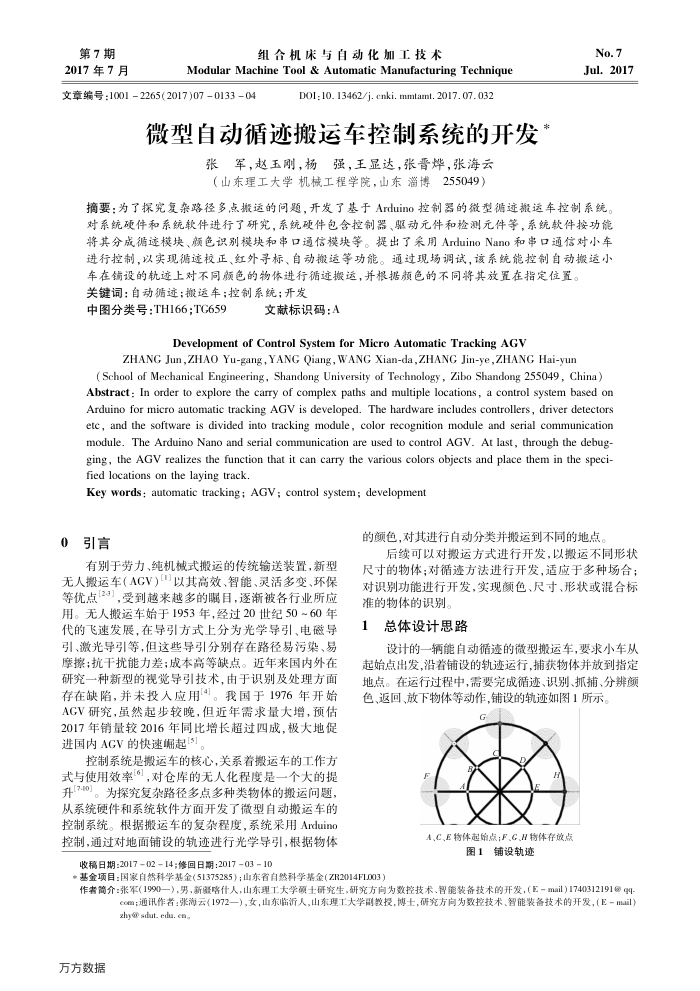
��Ƶ�һ�����Զ�ѭ�����Ͱ��˳���Ҫ��С������ʼ���������������Ĺ켣���У��������岢�ŵ�ָ���ص㡣�����й����У���Ҫ���ѭ����ʶ��ץ�����ֱ���ɫ�����ء���������ȶ���������Ĺ켣��ͼ1��ʾ��
G
4.C��E������ʼ�㣻F.G.H�����Ч��
ͼ1����켣
�ո����ڣ�20170214;�����ڣ�20170310
*������Ŀ���������ȿ�ѧ����51375285����ɽ��ʡ��Ȼ��ѧ����ZR2014FL003��
����飺�ž�(1990�������У��µ���ʲ�ˣ�ɽ��������ѧ˶���о������о�����Ϊ���ؼ���������װ�������Ŀ�������E-mail��1740312191@q
com��ͨѶ���ߣ��ź���(1972һ����Ů��ɽ�������ˣ�ɽ��������ѧ�����ڣ���ʿ���о�����Ϊ���ؼ���������װ�������Ŀ�������E-mail)�� zhy@ sdut. edu, cn��
������