您当前的位置:首页>论文资料>气动人工肌肉智能控制系统研究
内容简介
 机械工程师
机械工程师MECHANICAL ENGINEER
气动人工肌肉智能控制系统研究
冯文婷,苏东海,梁全
(沈阳工业大学机械工程学院,沈阳110870)
一气动人工肌肉,完成了基于单片机控制的气动人工肌肉位置控制系统,建
摘要:介绍了一种新型的气动热行机构一
立了数学模型,控制方法结合了神经网络与PID方法,PID的程序由单片机实现,神经网络的程序基于C++编写,由Qt平
台实现并完成良好的人机交互界面,实现了人工智能控制。关键词:气动人工肌肉:高速开关阀:智能控制
中图分类号:TG391.7
文献标志码:
文章编号:1002-2333(2016)04-0045-02
Research on Intelligent Control System for Pneumatic Artificial Muscle
FENG Wenting.SU Donghai,LIANG Quan
(School of Mechanical Engineering, Shenyang University of Technology,Shenyang 110870, China)
Abstract: This paper introduces a new type of pneumatic actuator called pneumatic artificial muscle completed position control system based on the single chip microcomputer. The math model of pneumatic artificial muscle is built. The program completes the control using neural network and PID method. The single chip microcomputer is responsible to complete the PID part, and the Qt is responsible to complete the neural network part with the C++ process.
Key words:pneumatic artificial muscle; high speed switch valve; intelligent control 0引言
气动人工肌肉属于一种新型的气动执行机构,它的主体包括编织网、橡胶管、卡箍3部分。编织网围在橡胶管的外部,卡箍套在人工肌肉的两端。气动人工肌肉有诸多优点,比如,具有更大的初始拉力和较强的收缩力,反应速度快,更具有柔性,成本较低,制作简单,可以自行设计长度及结构,更符合生产、医疗、生物应用,可以广泛应用在机器人行业、医疗仿生行业。气动人工肌肉的工作原理是充气时膨胀,其长度缩小,放气时长度伸长,利用这个原理气动人工肌肉可以做往复伸长收缩运动-6。
控制系统数学模型的建立及仿真
气动人工肌肉在负载不变的情况下,其长度大小由相对压力决
图1气动人工肌肉
肉的长度越小,其数学关系如下:
定,相对压力越大,则气动人工肌
(二x4mn'+b-)。 L=1
式中:L为气动人工肌肉的长度;P为相对压力;F为外界负【2】陈学东,孙翊.多足步行机器人运动规划与控制【M】武汉:华中
科技大学出版社,2006:1-2
姜铭,李鹭杨.混联仿生机器狗构型研究[J].机械工程学报,[3]
2012,48(1):1924
马彪.一种四足步行机器人结构设计与分析[D]北京:北京交[4]
通大学,2006
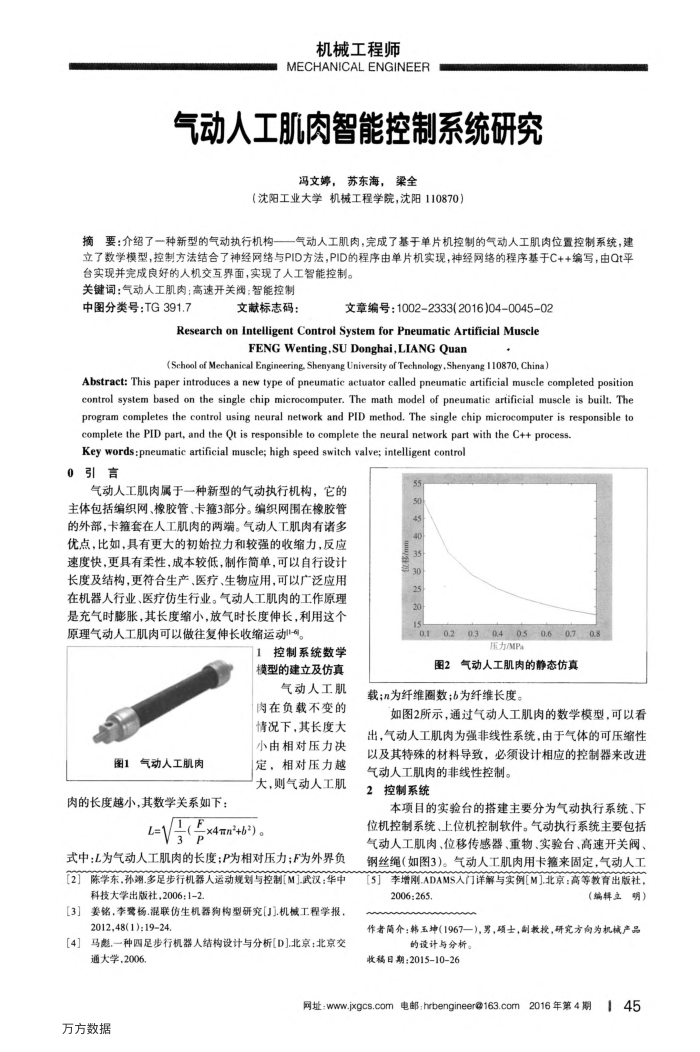
50 45 40
010.20.304050.60708
压力/MP
图2气动人工肌肉的静态仿真
载;n为纤维圈数;6为纤维长度。
如图2所示,通过气动人工肌肉的数学模型,可以看出,气动人工肌肉为强非线性系统,由于气体的可压缩性以及其特殊的材料导致,必须设计相应的控制器来改进
气动人工肌肉的非线性控制。 2控制系统
本项目的实验台的搭建主要分为气动执行系统、下位机控制系统、上位机控制软件。气动执行系统主要包括气动人工肌肉、位移传感器、重物、实验台、高速开关阀、钢丝绳(如图3)。气动人工肌肉用卡箍来固定,气动人工[5]】李增刚.ADAMS入门详解与实例[M].北京:高等教育出版社,
2006:265.
(编辑立明)
作者简介:韩玉坤(1967一),男,硕士,制教校,研究方向为机械产品
的设计与分析。
收稿日期:2015-10-26
网址:www.jxgcs.com电邮:hrbengineer@163.com 2016年第4期
万方数据
145
上一章:基于滑移网格的小型垂直轴风力机气动性能的数值模拟
下一章:液压系统节能分析浅析