您当前的位置:首页>论文资料>液压滚切剪电液伺服协同控制研究
内容简介
 2014年第6期
2014年第6期仅表技术与传感器 InstrumentTechnique
andSensor
液压滚切剪电液伺服协同控制研究
李宏杰,朱士伟,黄庆学,张伟
(太原科技大学,重型机械教育部工程研究中心,山西太原030024)
2014 No.6
摘要:以中厚板液压滚切剪为研究对象,在重点分析2个ACC系统在不同工况下的运行特点的基础上,提出了电液伺服系统的协同控制策略。首先建立了液压滚切剪电液伺服系统的数学模型;其次针对液压滚切剪电液例服控制系统的非线性、抗干扰性弱和时变等弱点,选择基于模糊PID控制的双闭环控制结构,完成了2个ACC控制回路之间的系统耦合误差动态分配,实现系统协同运动控制;最后对双缸协同运动控制系统完成了动态试验,试验结果表明系统的响应速度快,同时具有较好的位移协同运动性能。
关键调:液压滚切剪;AGC;电液伺服;双闭环;协同控制;模糊PID
中图分类号:TG333
文献标识码:A
文章编号:1002-1841(2014)06009904
Electro-hydraulic Servoof Cooperative Control ResearchforHydraulic Slitting Shear
LI Hong-jie,ZHU Shi-wei,HUANG Qing-xue,ZHANG Wei
(Taiyuan University of Science and Technology, Heavy Machinery Engineering Research Center of
the Ministry of Education, Taiyuan 030024, China)
Abstract : Using the hydraulic slitting shear plate as the research object,based on the analgsis of the operation characteristics of two AGC system under different working conditions, we put forward the coordinated control strategy of electro-hydraulic servo sys-tem, Firstly ,the hydraulic slitting shear was established by the mathematical model of electro-hydnaulic servo system, Secondly for the hydraulic slitting shear electro-hydraulic servo control system was of nonlinear, time-varying and weak anti-jamming weaknes-ses ,we chose double closed-loop control structure based on fuzzy PID control, completed coupling error dynamic allocation between the two AGC control circuit system and realized coordinated motion control, Finally ,the dynamic test of the two cylinder coordinated motion control system was finished. The results show that the system has response speed and good displacement synergy sports per formance.
Key words: hydraulic slitting shear; AGC;Electro-hydraulic servo;double closed loop;coordinated control ;the fuzzy PID
0引言
阀控缸电液伺服系统实现两路位移协同控制的难点是两路电液服系统的位移运动的协同一致(1-2),目前主要有2种控制方案实现多回路的耦合误差信号补偿:一是尽可能地减小单回路系统的跟踪误差以达到系统的协同控制精度;二是对多回路实施协同控制即采用耦合误差补偿方案,在不改变各单回路位移控制环节的情况下,给出以单回路的跟踪误差为基础的耦合误差计算模型,通过耦合误差分配器来补偿各单回路减小耦合误差(3]。为解决这一间题,提出了一种实用的位移协同运动的控制方法,并完成了现场试验验证。
1液压滚切剪双缸电液伺服系统 1.1系统简介及运动过程解析
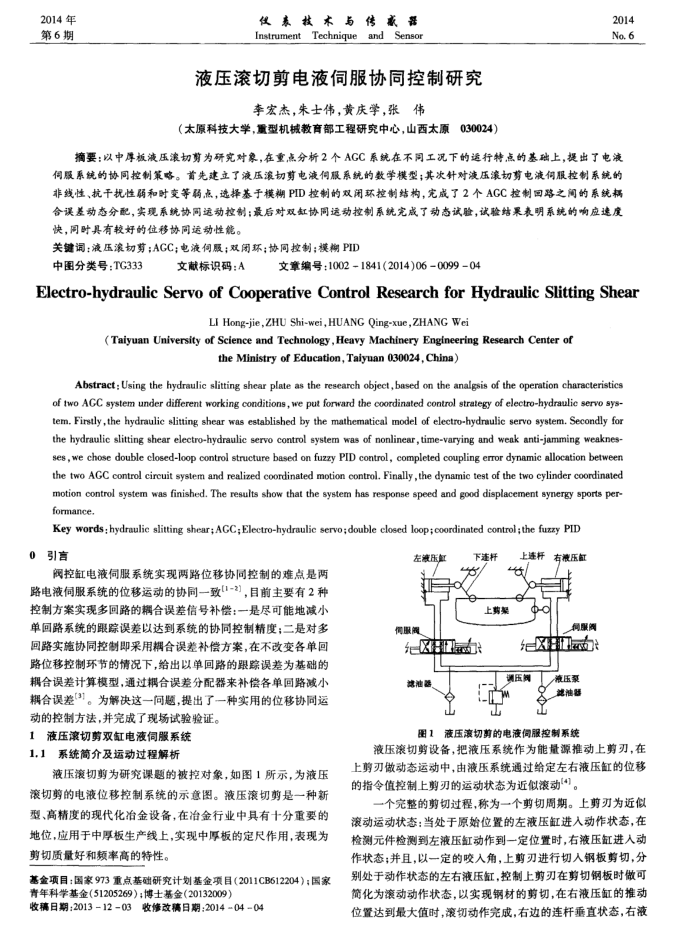
液压滚切剪为研究课题的被控对象,如图1所示,为液压滚切剪的电液位移控制系统的示意图。液压滚切剪是一种新型、高精度的现代化冶金设备,在冶金行业中具有十分重要的地位,应用于中厚板生产线上,实现中厚板的定尺作用,表现为剪切质量好和频率高的特性。
基金项目:国家973重点基础研究计划基金项目(2011CB612204);国家青年科学基金(51205269);博士基金(20132009)
收稿日期:2013-1203收修改稿日期:2014-04-04
左波压缸
下连杆 8
O
上势架
何服履
e区
滤油器、
山
上连杆 0o
有被压缸
网眼润
区
澳压网
液压泵 8
滤油器
图1液压滚切剪的电液伺服控制系统
液压滚切剪设备,把液压系统作为能量源推动上剪刃,在上剪刃做动态运动中,由液压系统通过给定左右液压缸的位移的指令值控制上剪刃的运动状态为近似滚动4)。
一个完整的剪切过程,称为一个剪切周期。上剪刃为近似滚动运动状态:当处于原始位置的左液压缸进入动作状态,在检测元件检测到左液压缸动作到一定位置时,右液压缸进人动作状态;并且,以一定的咬入角,上剪刃进行切入钢板剪切,分别处于动作状态的左右液压缸,控制上剪刃在剪切钢板时做可简化为滚动动作状态,以实现钢材的剪切,在右液压缸的推动位置达到最大值时,滚切动作完成,右边的连杆垂直状态,右液
上一章:万能轧机液压AGC系统动特性研究
下一章:小方坯连铸机结晶器振动液压系统优化