您当前的位置:首页>机械工程>全液压自动猫道翻板机构动力学仿真分析
内容简介
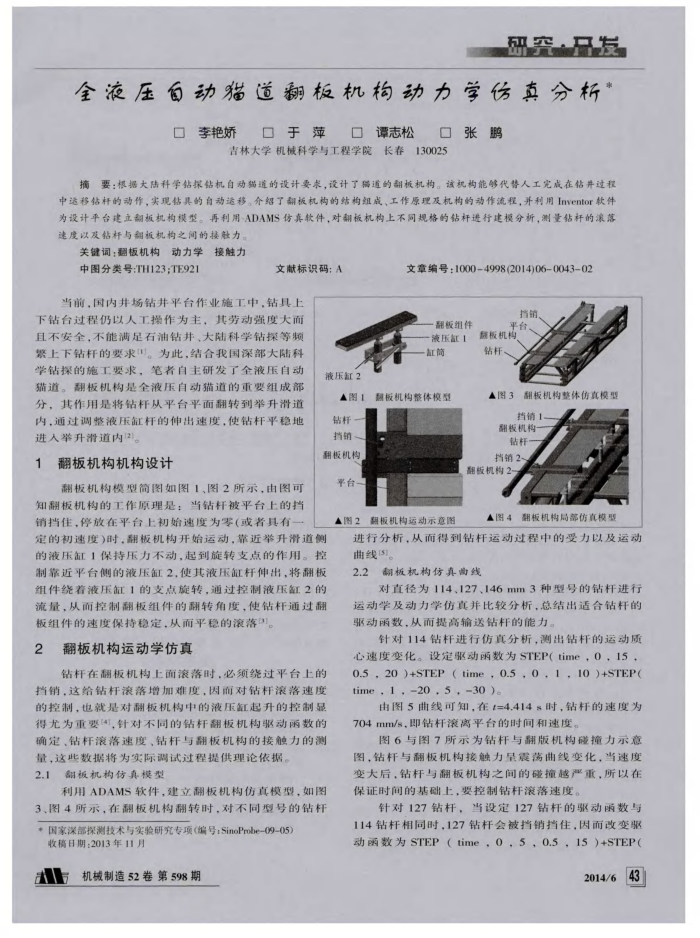 摘要∶根据大陆科学钻探钻机自动猫道的设计要求,设计了骗道的翻板机构。该机构能够代替人工完成在钻井过程中运移钻杆的动作,实现钻具的自动运移。介结了翻板机构的结构组成、工作原理及机构的动作流程,并利用Imvetor我件为设计平台建立翻板机构模型。再利用ADAMS仿真软件,对翻板机构上不同规格的钻杆进行建模分析,测量钻杆的滚落速度以及钻杆与细板机构之间的接触力。
摘要∶根据大陆科学钻探钻机自动猫道的设计要求,设计了骗道的翻板机构。该机构能够代替人工完成在钻井过程中运移钻杆的动作,实现钻具的自动运移。介结了翻板机构的结构组成、工作原理及机构的动作流程,并利用Imvetor我件为设计平台建立翻板机构模型。再利用ADAMS仿真软件,对翻板机构上不同规格的钻杆进行建模分析,测量钻杆的滚落速度以及钻杆与细板机构之间的接触力。
上一章:全液压转向系统的动态特性仿真
下一章:全液压自动猫道举升系统运动学分析