您当前的位置:首页>论文资料>基于STM32的伺服云台天线控制系统
内容简介
 数控技术
数控技术基于 STM32的伺服云台天线控制系统
崔梦丹
(长安大学电控学院陕西西安710064)
数字投本与庆用
摘要:随着科技的日益发展,对伺服电机的控制从PLC控制平台,选入集成IC芯片的平台。以前PLC控制平台的云台机箱体积大、质量重、竭程复紊为解决达费对云台控制系统带来的不便,研究了基于STM32伺服云台天线控制系统。本文主要介绍了该系统的软硬件设计,并通过实验证明可以实现精确而简单的控制
关键词:嵌入式向服电机控制中图分类号:TP273.5
文献标识码:A
1前言
在现代社会,无线电通信在信息传输中扮演着越来越重要的角色,天线作为接收和发送电磁波的装置,在无线电通信中也扮演着非常重要的角色。云台就是安装在固定天线和支撑架中间的连接器。传统云台机箱体积较大,编程复杂、质量也很重,在空间上受限,并且灵活性较差。它的控制器大都采用单片机,在数据传输的速率和交换量上都相当有限,速度基本上也都稳定,当环境发生实变或目标变化较大时就会出现跟踪和感知能力差的问愿。无法实现装置对系统稳定和安全方面的要求。
目前云台控制系统的研究中有两方面急需解决:一方面是研究体积更小,质量更轻、使用更加方便的装置,另一个则向控制性能更加优良方面设计。为了满足上述需求,本文中硬件是以STM32驱动伺服电机为基础,并且配合SSI208P解码器,软件是以C#提供的组件建立的一个应用程序,研究了一种基于STM32的云台天线控制系统。
2系统整体设计
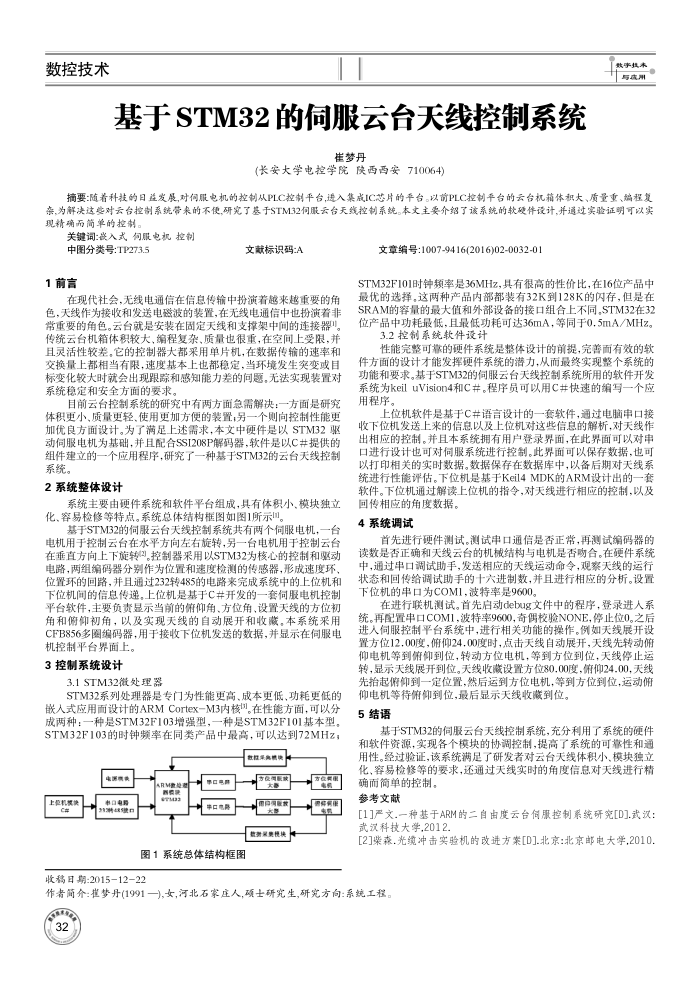
系统主要由硬件系统和软件平台组成,具有体积小、模块独立化、容易检修等特点。系统总体结构框图如图1所示。
基于STM32的何服云台天线控制系统共有两个伺服电机,一台电机用于控制云台在水平方向左右旋转,另一台电机用于控制云台在垂直方向上下旋转3。控制器采用以STM32为核心的控制和驱动电路,两组编码器分别作为位置和速度检测的传感器,形成速度环,位置环的回路,并且通过232转485的电路来完成系统中的上位机和下位机间的信息传递,上位机是基于C#开发的一套伺服电机控制平台软件,主要负责显示当前的筛仰角方位角,设置天线的方位初角和俯仰初角,以及实现天线的自动展开和收藏,本系统采用 CFB856多圈编码器,用于接收下位机发送的数据,并显示在伺服电
机控制平台界面上。 3控制系统设计
3.1STM32微处理器
STM32系列处理器是专门为性能更高、成本更低、功耗更低的嵌人式应用面设计的ARMCortex-M3内核"。在性能方面,可以分成两种:一种是STM32F103增强型,一种是STM32F101基本型, STM32F103的时钟频率在同类产品中最高,可以达到72MHz;
教控采负模快
电国视货
上机模块
口电话 32485口
事口电器针年口电界
用日润股技数势采费视换
图1系统总体结构框图
收移日期:2015-12-22
方他用s器
文章编号:1007-9416(2016)02-0032-01
STM32F101时钟频率是36MHz,具有很高的性价比,在16位产品中最优的选择,这两种产品内部都装有32K到128K的闪存,但是在 SRAM的容量的最大值和外部设备的接口组合上不同,STM32在32 位产品中功耗最低,且最低功耗可达36mA,等同于0.5mA/MHz。
3.2控制系统软件设计
性能完整可靠的硬件系统是整体设计的前提,完善面有效的软件方面的设计才能发挥硬件系统的潜力,从而最终实现鉴个系统的功能和要求。基于STM32的伺服云台天线控制系统所用的软件开发系统为keiluVision4和C#。程序员可以用C井快速的编写一个应用程序,
上位机软件是基于C井语言设计的一套软件,通过电脑申口接
收下位机发送上来的信息以及上位机对这些信息的解析,对天线作出相应的控制。并且本系统拥有用户登录界面,在此界面可以对申口进行设计也可对伺服系统进行控制。此界面可以保存数据,也可以打印相关的实时数据。数据保存在数据库中,以备后期对天线系统进行性能评估。下位机是基于Keil4MDK的ARM设计出的
一套
软件。下位机通过解读上位机的指令,对天线进行相应的控制,以及
回传相应的角度数据。 4系统调试
首先进行硬件测试。测试串口通信是否正常,再测试编码器的读数是否正确和天线云台的机械结构与电机是否响合。在硬件系统中,通过串口调试助手,发送相应的天线运动命令,观察天线的运行状态和回传给调试助手的十六进制数,并且进行相应的分析。设置下位机的串口为COM1,波特率是9600。
在进行联机测试。首先启动debug文件中的程序,登录进人系统。再配置串口COM1,波特率9600,奇偶校验NONE,停止位0。之后进人伺服控制平台系统中,进行相关功能的操作。例如天线展开设置方位12.00度,俯仰24.00度时,点击天线自动展开,天线先转动俯仰电机等到筛仰到位,转动方位电机,等到方位到位,天线停止运转,显示天线展开到位。天线收截设置方位80.00度,筛仰24.00,天线先抬起仰到一定位置,然后运到方位电机,等到方位到位,运动确
仰电机等待筛仰到位,最后显示天线收藏到位。 5结语
基于STM32的伺服云台天线控制系统,充分利用了系统的硬件和软件资源,实现各个模块的协调控制,提高了系统的可靠性和通用性。经过验证,该系统满足了研发者对云台天线体积小、模块独立化,容易检修等的要求,还通过天线实时的角度信息对天线进行精
确而简单的控制,参考文献
[1]严文.一种基于ARM的二自由度云台何累控制系统研[D].武汉:武汉科技大学,2012.
[2]柴森.光缆冲击实验机的改进方案[D].北京:北京邮电大学,2010.
作者简介:崔梦丹(1991一),女,河北石家庭人,颈士研究生,研究方向:系统工程
上一章:基于RFID的智能停车场管理系统设计
下一章:基于MIS和RFID技术的巡检系统