您当前的位置:首页>论文资料>基于STM32的无线调节起跑器控制系统
内容简介
 数学执本与度用
数学执本与度用数控技术
基于STM32的无线调节起跑器控制系统
林凯王宇杰章健
(郑州大学电气工程学院河南郑州450001)
摘要:丈章主要介绍了一种基于STM32可无线调节起跑器的控制系统该系统以STM32为核心器件,赛前采集不同运动员对越跑器使用习惯的数据,通过PC机将信息利用nRP905无战模块传递给起跑器上的单片机,由单片机控制调节起跑器的角度、位置。实现了缩短运动置在赛场手动调节起跑器的时间,有利于运动员提高比赛成绩,同时加快了比署进程,增加了比赛的观费性。
关键调STM32无线调节控制系统中图分类号:TN919
1引言
文献标识码:A
在短跑竞赛中,起跑器是常见的体育器材,它能帮助运动员提高起跑速度,取得好成绩。但是运动员在赛前需要不断手动调节适合自已起跑的起跑器位置。如著没有调节好自已适应的起跑器位置便开始比赛,运动员很难取得自已理想的成绩。本文设计了一种起胞器控制系统,可实现赛前无线调节起跑器位置、角度,缩短了运动员赛场上手动调节起跑器的时间,有利于运动员提高比赛成绩,同
时加快了比赛进程,增加了比赛的观贫性。 2系统结构及设计方案
系统由STM32单片机,起跑器、RS232电平转换电路、nRF905 无线模块,S3003能机,42系列步进电机、M542H电机驱动,直线滑台、PC机组成。赛前采集运动员习惯使用起跑器的位置、角度等信息,存储在PC机的数据库中。正式比赛前,使用PC机上位机界面将数据通过RS232申口传输给与PC机相连的STM32中,由无线模块 nRF905成功接收到STM32传输的数据后发送,当装在起跑器上的无线模块nRF905成功接收后,将数据发送给起器上的STM32单片机进行处理,单片机将处理的数据转化为两部分,一是调节角度信号即PWM的占空比,实现抵足板角度的控制。二是将处理的位置数据转化为脉冲个数,使固定在直线滑台上的步进电机旋转一定围数,改变固定在直线滑台上的两抵足板的前后位置无线调节起跑
器的控制系统总体方框图如图1所示, 3系统硬件电路及部分机械简图
3.1主控制器
本系统采用意法半导体公司(ST)推出的基于ARMCortex-M3 内核的32位处理器芯片STM32F103VBT6作为控制核心工作频率为72MHz,内置高速存储器,丰富的增强I/O端口和连接到两条APB 总线的外设。采用STM32来接收PC机传输的数据和配合nRF905控制能机和步进电机实现对起胞器角度、位置的调节。
PC 机步进电机
超跑器
能机
收稿日期:201604-07
图1
STM32#1 STM32#2
nRF905#1 nRF905#2
文章编号:1007-9416(2016)06-0003-02 3.2无线传输模块
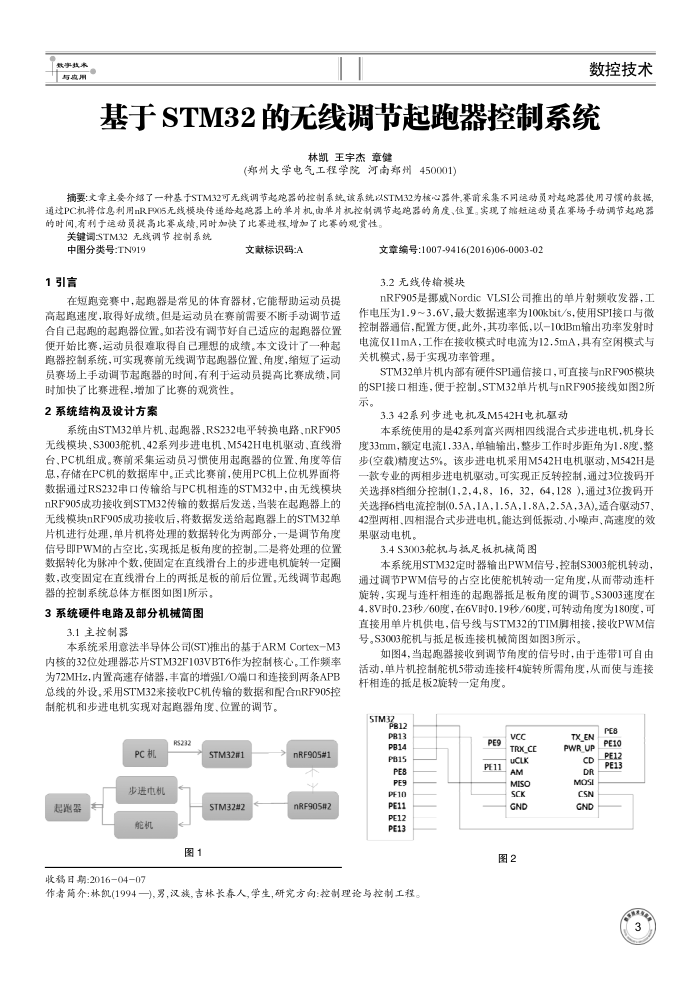
nRF905是挪成NordicVLSI公司推出的单片射频收发器,工作电压为1.9~3.6V,最大数据速率为100kbit/s,使用SPI接口与微控制器通信,配置方使,此外,其功率低,以一10Bm输出功率发射时电流仅11mA,工作在接收模式时电流为12.5mA,具有空闲模式与关机模式,易于实现功率管理。
STM32单片机内部有硬件SPI通信接口,可直接与nRF905模块的SPI接口相连,便于控制,STM32单片机与nRF905接线如图2所
示。
3.342系列步进电机及M542H电机驱动
本系统使用的是42系列富兴两相四线混合式步进电机,机身长
度33mm,额定电流1.33A,单轴输出,整步工作时步距角为1.8度,整步(空载)精度达5%。该步进电机采用M542H电机驱动,M542H是-款专业的两相步进电机驱动。可实现正反转控制,通过3位拨码开关选择8档细分控制(1,2,4,8,16,32,64,128),通过3位拨码开关选择6档电流控制(0.5A,1A.1.5A.1.8A.2.5A.3A).适合驱动57 42型两相、四相混合式步进电机,能达到低振动、小噪声、高速度的效果驱动电机,
3.4S3003能机与抵足板机械简图
本系统用STM32定时器输出PWM信号,控制S3003能机转动,通过调节PWM信号的占空比使能机转动一定角度,从而带动连杆旋转,实现与连杆相连的起跑器抵足板角度的调节。S3003速度在 4.8V时0.23秒/60度,在6V时0.19秒/60度,可转动角度为180度,可直接用单片机供电,信号线与STM32的TIM脚相接,接收PWM信号。S3003能机与抵足板连接机械简图如图3所示。
如图4,当起跑器接收到调节角度的信号时,由于连带1可自由活动,单片机控制能机5带动连接杆4旋转所需角度,从而使与连接
杆相连的抵足板2旋转一定角度。 5Mge12
P813 PB14 PB15 PE8 PE9 PF10 PE11 PE12 PE13
作者简介:林凯(1994一),男,汉族,吉林长春人,学生,研究方向:控制理论与控制工程。
vcC PE9
uCLK PE11
AM MISO SCK GND
图2
PE8
TX_EN
PE10
PWR_UP
PE12 CD
PE13
DR MOSI CSN GND
上一章:基于交换机与路由器接入方式不同的研究
下一章:k-维子连通的超立方体中并行路由