您当前的位置:首页>论文资料>超声波测距系统的研究与应用
内容简介
 数字技术与应用
数字技术与应用超声波测距系统的研究与应用
医小军
(或汉纺织大学电子信息工程学院
湖北武汉
430073)
:应用研究:
摘要:安全避障是机器人上录重要部分之一,乃至与我们生活习习相关的汽车电要注意安全避障。本文研究的是基于AT89C2051的超产波测距系就在汽车安全装置上的应用,该系就由超声波发射电路,国波接妆电路和PC机数据采案显承系就及其报查电路组成,这美研究将会让汽车的安全暴
数得到板大的提高,是一个值得深入的方向。
关键调:AT89C2051
超声波测距系统
中图分类号:TP242
数据来票显示系统报量系统
文献标识码:A
随着我国经济突飞猛进的发展,人们生活水平得到很大的提高。越来越多的家庭有多余的钱来买爱车了,但是公路,街道的宽度是一定的,这样给驾驶员泊车,倒车带来很大的不方便。与此同时,汽车行业也在飞速的发展,人们买车的・个硬性指标考患汽车的安全系数问题,本文研究的超声波测距系统能消除泊车,倒车中的不安全内数,能让驾驶员做到心中有数,极大的提高了泊车和倒车的安全和效率,
1超声波测距的基本原理
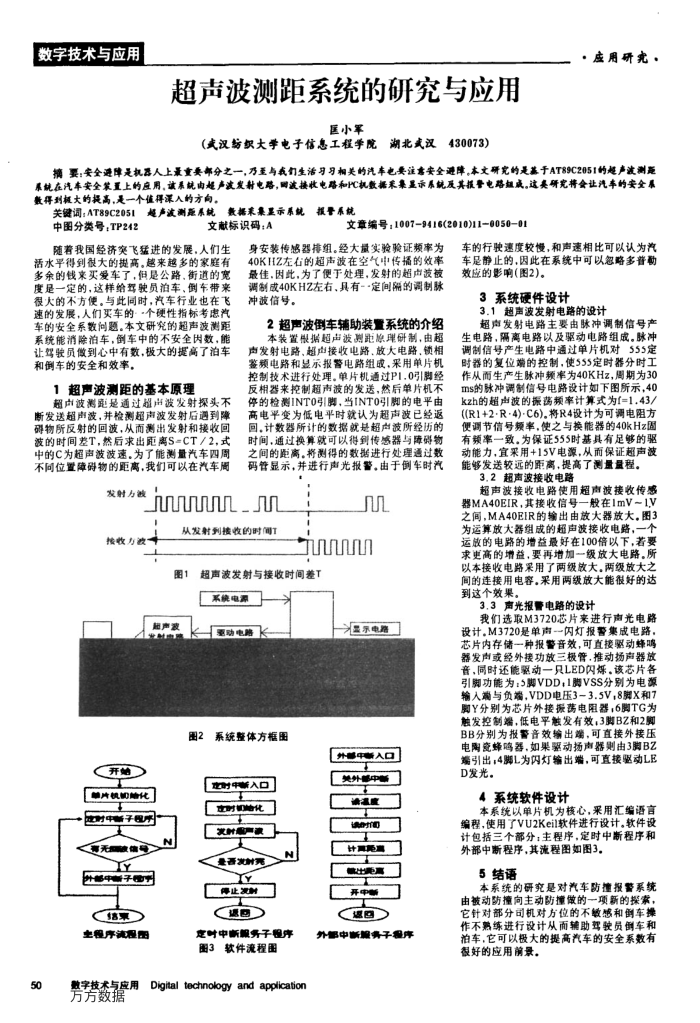
超卢波离距是通过超由波发射探头不断发送超声波,并检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差T,然后求出距离S=CT/2,式中的C为超声波波速.为了能测量汽车四周不间位置障碍物的距离,我们可以在汽车周
发射方波接收力波一
0
文章编号:1007-9416(2010)11-050-01
身安装传感器排组。经大量实验验证频率为 40KHZ左石的超声波在空气中传插的效率最佳,因此,为了便于处理,发射的超声波被调制或40KHZ左右,具有-定间隔的调制脉冲波信号。
2超声波倒车辅助装置系统的介绍本装置根据超声波测距象理研制,由超
声发射电路,超声接收电路.放大电路,锁相签频电路和显示报警电路组或,采用单片机控制技术进行处理。单片机通过P1.0引脚经反相器来控制超声波的发送,然后单片机不停的检测INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回,计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距高。将测得的数据进行处理通过数码管显示,并进行声光报警。由于倒车时汽
加
从发射到接收的时间T
1
超声波
心
uuuuu
超声波发射与接收时间差T 系统电源
示电路
品
图2系统整体方框图
外部中新入口
(开始单片机奶始化成时中新子国界每无破信号
YY
外部中新子的享给票主视序流程器
50
数字技术与应用万方数据
时中入口定时机地化淡思严
量西发射克停止发射速图
N
定时中断服务子程序
图3
软件流程围
Digital technology and application
美外中
谢温度计票就出更高开断返
外部中新服务子程序
车的行驶速度较慢,和声速相比可以认为汽车足静止的,因此在系统中可以忽略路多普勘效应的影响(图2)。
3系统硬件设计
3.1超声波发射电路的设计
超声发射电路主要由脉冲调制信号产生电路,隔离电路以及驱动电路组成。脉冲调制信号产生电路中通过单片机对555定时器的复位端的控制,使555定时器分时工作从而生产生脉冲频率为40KHz,周期为30 ms的脉冲调制信号电路设计如下图所示,40 kzh的超声波的探荡频率计算式为f=1.43/((R1+2・R・4)・C6).将R4设计为可调电阻方便调节信号频率,使之与换能器的40kHz固有频率一致。为保证555时基具有足够的驱动能力,宜采用+15V电源,从而保证超声波
能够发送较远的距离,提高了测量量程。 3.2超声波接收电路
超声波接收电路使用超声波接收传感器MA40EIR,其接收信号一般在1mV~1V 之间,MA40EIR的输出由放大器放大,图3 为运算放大器组成的超声波接收电路,一个运放的电路的增益最好在100倍以下,若要求更高的增益,要再增加一级放大电路。所以本接收电路采用了两级放大。两级放大之间的连接用电容。采用两级放大能很好的达到这个效果。
3.3声光报警电路的设计
我们选取M3720芯片来进行声光电路设计。M3720是单声闪灯报警集成电路,芯片内存储一种报警音效,可直接驱动蜂鸣器发声或经外接功放三极管.推动扬声器放音,同时还能驱动一只LED闪烁。该芯片各引脚功能为5脚VDD,1膜VSS分别为电源输人端与负端,VDD电压3-3.5V,8脚X和7 脚Y分别为芯片外接摄荡电阻器;6脚TG为触发控制端,低电平触发有效,3脚BZ和2 BB分别为报警音效输出端,可直接外接压电陶瓷蜂跨器,如果墨动扬声器则由3脚BZ 端引出,4脚L为闪灯输出端,可直接驱动LE D发光。
系统软件设计
本系统以单片机为核心,采用汇编语言编程,使用了VU2Keil软件进行设计。软件设计包括三个部分;主程序,定时中断程序和
外部中断程序,其滤程图如图3。 5结语
本系统的研究是对汽车防撞报警系统由被动防撞向主动防撞做的一项新的探索,它针对部分司机对方位的不敏感和倒车操作不熟练进行设计从而辅助驾驶员倒车和泊车,它可以极大的提高汽车的安全系数有很好的应用前景。
上一章:北京市大型立交桥路考虚拟驾驶系统的设计与实现
下一章:毕业设计管理系统的设计与研究