���ڴ��������ɶ��˶��Ĵ������а�ȫʵʱ���ϵͳ�о�
���ݼ��
 ���ؼ���
���ؼ������ڴ��������ɶ��˶���
�������а�ȫʵʱ���ϵͳ�о�
������Ƴ����»�
(���ݺ���ѧԺ�㶫����510725)
ժҪ:���ſ�ѧ��ˮ�Ŀ��ٷ�չ,�ﶦ��ҵ��������ѡ�в��ϵĽ��������ں��а�ȫ�Ǵ�����ҵ�����Ļ���,����,��Դ������еİ�ȫ�Խ��йؼ��������о��Ƿdz��б�Ҫ�ġ�������Ҫ��MMG��ADRC��SVM�ȼ����ֶεĽǶȽ��п���,�о������ڴ��������ɶ��˶��Ĵ������а�ȫʵʱ���ϵͳ,�Դ�����������ں��й����в���ȷ�ⶨ�����ĺ���״̬�Լ����ܶԴ���������ˮ�����ʵʱ�������ʼ��⣬��ϵͳ���о�,�Ǵ�ͳ�Ĵ��Ǻ��а�ȫʵʱ��ؼ�����һ�ν�����
�ؼ��������������ɶ��˶���������ʵʱ���ϵͳ�о�
��ͼ����ţ�U664.82 1ϵͳ�о���Ŀ�ı���
���ױ�ʶ��:B
���±��:1007-9416(2013)06-0024-02
�����Ǹ�ϵͳ�о��ĺ������ݣ����ڴ��������ɶ��˶��Ĵ�������
���Ŵ�����ҵ�����IJ��Ϸ�չ����������ڴ�����ȫ���з�����о�ҲԽ��Խ�ࡣȻ����Ŀǰ�Դ������о���Ҫ����Դ�λ��������ȫ����Դ������а�ȫʵʱ��ط�����о������˵�Ƚ��٣��ں��й����У��Դ��������ɶ��˶�ʵ��ʵʱ����ܹ���Ч�ı��ϴ������еİ�ȫ����ˣ��Դ������а�ȫʵʱ���ϵͳ�����о��Ƿdz��б�Ҫ�Ĵ�Ŀǰ�ļ�����չˮƽ��������ˮ����ͨ��ȫ���ϵͳ���о��뿪���Ѿ�ȡ���˷dz���Ľ�����Ȼ�棬���ô����������ɶ��˶��Ĵ������а�ȫϵͳ���о�Ŀǰ�������졣�Դ������а�ȫʵʱ���ϵͳ�����о��������������ں��й��������ϵͳ���غ������ݣ���һ����ˮ�еIJ��ȶ��Բ�ؼ��������о����ܹ��ںܴ�̶��ϱ��⺣�ϰ�ȫ�¹ʵķ�����Ϊ�������еİ�ȫ�ṩ���ϡ������ں��й����п��Բ���6�����ɶȵ��˶�����6�����ɶ��˶���Ϊ�ᵴ���ݵ����������塢��ҡ����ҡ�������ڴ��������ɶ��˶��Ĵ������а�ȫʵʱ���ϵͳ���о��뿪���������ˮ�Ͻ�ͨ��ȫ�к���Ҫ�����ã�ͬʱΪ������ȫ��ˮ·��ͨ�����֧�֣�
���ø�ϵͳ�ܹ��ܴ�̶��ϱ���ˮ�Ͻ�ͨ�¹ʵķ����� 2ϵͳ����Ҫ����
���ڴ��������ɶ��˶��Ĵ������а�ȫʵʱ���ϵͳ����Ҫ
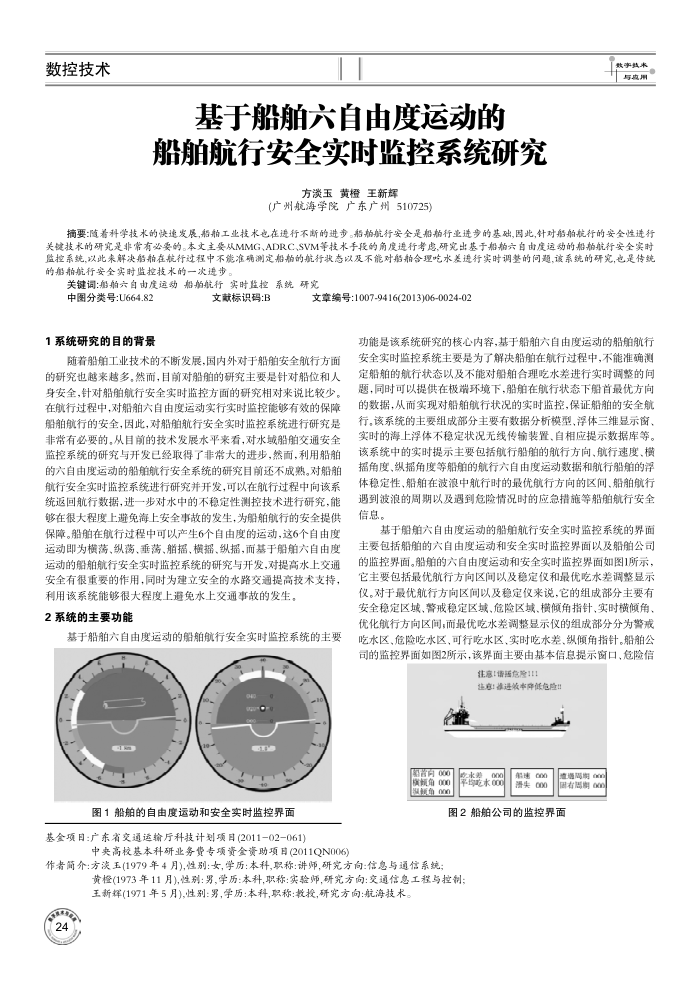
ͼ1���������ɶ��˶��Ͱ�ȫʵʱ��ؽ���
������Ŀ���㶫ʡ��ͨ�������Ƽ��ƻ���Ŀ(2011-02-061)
�����У��������ҵ���ר���ʽ�������Ŀ(2011QN006)
��ȫʵʱ���ϵͳ��Ҫ��Ϊ�˽�������ں��й����У�����ȷ�ⶨ�����ĺ���״̬�Լ����ܶԴ���������ˮ�����ʵʱ���������⣬ͬʱ�����ṩ�ڼ��˻����£������ں���״̬�´������ŷ�������ݣ��Ӷ�ʵ�ֶԴ�������״����ʵʱ��أ���֤�����İ�ȫ���С���ϵͳ����Ҫ��ɲ�����Ҫ�����ݷ���ģ�ͣ�������ά��ʾ����ʵʱ�ĺ��ϸ��岻�ȶ�״�����ߴ���װ�á�����Ӧ��ʾ���ݿ�ȡ���ϵͳ�е�ʵʱ��ʾ��Ҫ�������д����ĺ��з������ٶȺᲥ�Ƕȡ��ݲ��Ƕȵȴ����ĺ��������ɶ��˶����ݺͺ��д����ĸ����ȶ��ԣ������ڲ����к���ʱ�����ź��з��������.���������������˵������Լ�����Σ�����ʱ��Ӧ����ʩ�ȴ������а�ȫ��Ϣ��
���ڴ��������ɶ��˶��Ĵ������а�ȫʵʱ���ϵͳ�Ľ�����Ҫ���������������ɶ��˶��Ͱ�ȫʵʱ��ؽ����Լ�������˾�ļ�ؽ��档�����������ɶ��˶��Ͱ�ȫʵʱ��ؽ�����ͼ1��ʾ������Ҫ�������ź��з��������Լ��ȶ��Ǻ����ų�ˮ�������ʾ�ǡ��������ź��з��������Լ��ȶ�����˵��������ɲ�����Ҫ�а�ȫ�ȶ��������ȶ�����Σ������.�����ָ�롢ʵʱ����ǡ��Ż����з������ż䣬�����ų�ˮ�������ʾ�ǵ���ɲ��ַ�Ϊ�����ˮ����Σ�ճ�ˮ�������г�ˮ����ʵʱ��ˮ������ָ�롣�������ɵļ�ؽ�����ͼ2��ʾ���ý�����Ҫ�ɻ�����Ϣ��ʾ���ڡ�Σ����
ע�⣡��ҽΣ�գ���
�⣺˭��������ͼ��գ�
000[�ǵ����ս�000) ����00
ˮ0
��ʧ600
��ͨ����000 ��������000
ͼ2������˾�ļ�ؽ���
����飺������(1979��4��),�Ա�Ů��ѧ��������,ְ�ƣ���ʦ���о�������Ϣ��ͨ��ϵͳ
�Ƽ�(1973��11��),���У��У�ѧ�������ƣ�ְ�ƣ�ʵ��ʦ���о�����ͨ��Ϣ��������ƣ����»�(1971��5��)���Ա��У�ѧ�������ƣ�ְ�ƣ���Ͷ���о�������������
��һ�£�����С���任�İ�����Ƶѹ������
��һ�£��������������ݴ���ͨѶ�������