SINS∕CNS组合导航对高空飞行器再入精度的影响
内容简介
 学术论坛
学术论坛SINS/CNS 组合导航对高空飞行器再入精度的影响
张斌陈春歌
(中国人民解放军91550部队辽宁大连116023)
费事与度用
摘要:分析了SINS/CNS组含导航的基本原理。根据以自主惯性导航为主发展的组含导航系统的方向,提出SINS/CNS组合导航系统不同的组合模式,用误差状态转移阵的方法来修正由初始失准角、陀媒漂移、加速度计零编三类误差源造成的飞行器主动段的速度、位置误差,改善高空飞行器的再入精度,并对此理论进行了仿真分析
关键调:SINS候性导航CNS天文导航组合导航再入精度
中图分类号:V249 引言
文献标识码:A
文章编号:1007-9416(2013)05-0226-03
2SINS/CNS组合导航系统建模
目前,远程、长航时飞行载体的高精度导航很难通过一种导航手段实现:纯惯性导航系统自主性强,短时精度高,但误差随时间积累,天文导航能够提供高精度姿态信息,但易受气候条件限制;卫星导航系统能够提供准确的位置和速度,但很容易受到干扰,且导航信息不连续。因此,将多种导航方式有机结合,充分发挥各自优势,进行组合导航,是实现高精度导航的必由之路。但我国目前还没有功能完备的卫星导航系统,若依赖GPS与GLONASS,平时是不可靠的,战时是危险的。因而研究惯性/天文组合导航系统对我国实现远程,长航时飞行载体的高精度导航具有重要意义,本文将主要研究高空飞行器的SINS/CNS组合导航技术及其仿真。
1SINS/CNS组合导航基本原理
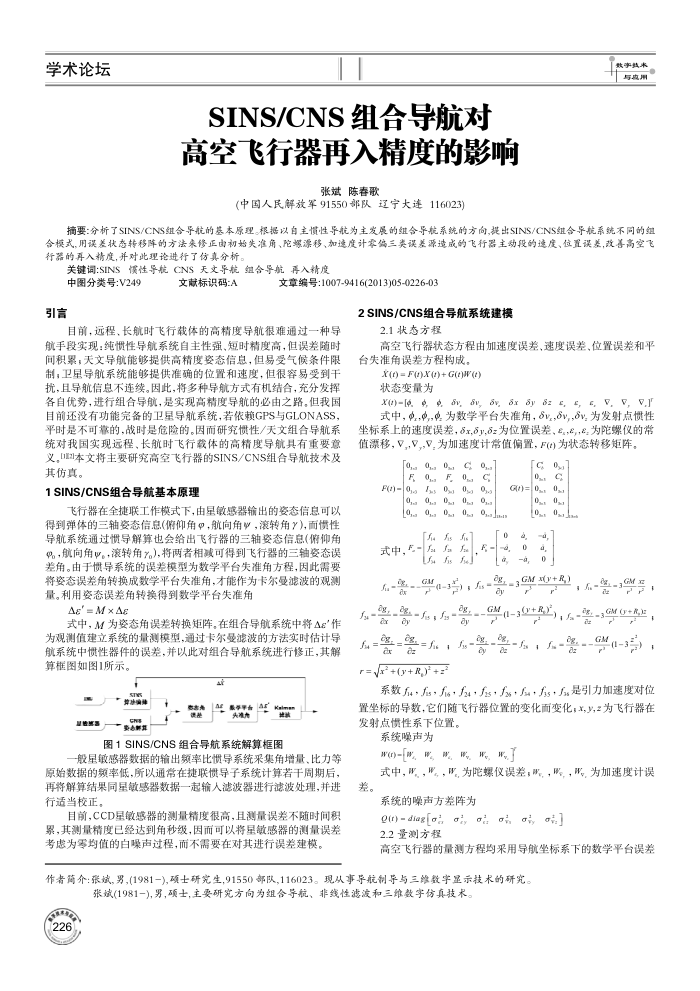
飞行器在全捷联工作模式下,由星敏感器输出的姿态信息可以得到弹体的三轴姿态信息(俯仰角甲,航向角,滚转角7),面惯性导航系统通过惯导解算也会给出飞行器的三轴态信息(仰角 9%,航向角。,滚转角>。),将两者相威可得到飞行器的三轴姿态误差角。由于惯导系统的误差模型为数学平台失准角方程,因此需要将姿态误差角转换成数学平台失准角,才能作为卡尔受滤波的观测量。利用姿态误差角转换得到数学平台失准角
= M×
式中,M为姿态角误差转换矩阵,在组合导航系统中将△s"作为观测值建立系统的量测模型,通过卡尔曼滤波的方法实时估计导航系统中惯性器件的误差,并以此对组合导航系统进行修正,其解算框图如图1所示。
STES 尊#
显格然器
要心群算
先胰器
a
最学平面
ks
大
批
图1SINS/CNS组合导航系统解算框图
一般星敏感器数据的输出频率比惯导系统采集角增量、比力等
原始数据的频率低,所以通常在捷联惯导子系统计算著干周期后:再将解算结果同星敏感器数据一起输人滤波器进行滤波处理,并进行适当校正。
目前,CCD星敏感器的测量精度很高,且测量误差不随时间积累,其测量精度已经达到角秒级,固而可以将星敏感器的测量误差考患为零均值的白噪声过程,而不需要在对其进行误差建模。
2.1状态方程
高空飞行器状态方程由加速度误差,速度误差,位置误差和平台失准角误差方程构成。
X(r) = F()X (2)+ G(t)W(e) 状态变量为
X()[, , &v, &v, v,y &z, , , V, V, V,] 式中,9.,更为数学平台失准角,Sv,3v,,8v为发射点惯性
坐标系上的速度误差,6x,6y,52为位置误差,,e,,e,为陷螺仪的常值漂移,V,,V,V.为加速度计常值偏置,F()为状态转移矩阵。
00[o,
0
F(n),a
0, 0,
F
c, o.
0
c
s
0
0
0, 0
0,
0
0
『c,
o
c
0,o
0,0元
0
o
sf
0
[0, o, -a,
式中,-表.--
0
L is e]
e,
8
4
3GM x+R)
,.-G
.-,
dy
姐蛋-f,
-2,--GM(3(+R),
上),(
dy
-,最-%,号号%
ara
= / +(y+ R,) +
ya
系数4Jis,Jis,f4,Js,J%+Ju+Js+J是引力加速度对位置坐标的导数,它们随飞行器位置的变化面变化,X,,2为飞行器在发射点惯性系下位置。
系统噪声为
W(r)w,W,w,We,,
式中,W,,W,,W,为陀螺仪误差;W,,限,,W为加速度计误差。
系统的噪声方差阵为
Q(r)diagfoaiy oi,ayo 2.2量测方程
高空飞行器的量测方程均采用导航坐标系下的数学平台误差
作者简介:张域男,(1981-),项士研究生,91550部队,116023。现从事导航制导与三终数宇星示技术的研究。
张斌(1981一),男,硕士,主要研究方向为组合导航、非线性滤波和三维数宇仿真技术
026
上一章:地磁匹配导航的精度分析
下一章:航空安全系统维护与故障维修技术分析