����ǰ��λ�ã���ҳ>��������>�ش�ƥ�䵼���ľ��ȷ���
�ش�ƥ�䵼���ľ��ȷ���
���ݼ��
 �����۲���
�����۲����ش�ƥ�䵼���ľ��ȷ���
֣����
����������ֹ�˾�������ͼ��������������վ
��������
750006)
���ּ�����Ӧ��
Ҫ]���һ���µĵ���ϵͳһ�ش�ƥ�䵼���ľ��Ƚ������о����ڽ����˵ش�ƥ�䵼���Ļ���ԭ���Ļ����ϣ������˵ش�ƥ[ժ
��ϵͳ����ʽ��ģ�͡�������Ӱ��ش�ƥ�䵼�����ȵľ������أ�����Ӳ��������2���������������䶨λ���ȵ�;����
[�ؼ���]�ش�ƥ��
��������
[��ͼ�����JV249.32
���Ե���ϵͳ
[���ױ�ʶ��]A
[���±��]1007-9416��2010)07014902
Precision analysis of geomagnetic matching navigation
Zhen Lihua
(Chang qing Branch, oil city of Yin Chuanyinchuan,750006)
[ABSTRACTIThe precision of a new navigation system��geomagnetic matching (GM) navigation was investigated. After the
Crucial factors affecting GM navigation
introduction of the basic principles of GM system, the formalized model of GM was given.
precision was analyzed, and the ways, from the two aspects of hardware and software, to enhance the performance of GM navigation were proposed finally.
[KEY WORDSJGeomagnetic matching; navigation precision, inertial navigation system
1����
��һ��ʧ�������ǵ�����е�
�شų���
������Դ������ȫ��ʱ��ȫ��þ��ȫ�سǵ��������ڵ�����ؿռ������⡤����ıܳ�ǿ��ʸ������Ψ-�ԣ�����õ�ľ�γ��һһ��Ӧ��ֻҪȷȷ������ĵشų�ʧ������ʵ��ȫ��λ��
�����ش�ƥ��GM(Geomagnetic Matching)������ʵ�����ɹ��Ե���ϵͳ(INS)���شŴ������͵شŻ�ͼ�ȹ��ɵ���ϵ�������ϵͳ���Բ��ص��������� INS���ۻ�������INS�ĵ���ϵͳ����ߵ������ȡ�GMϵͳ��Ϊһ�����͵���ϵͳ֮�����������ǵĹ㷺ע����H���ܵ���ע1-21,����Ϊ�شų��ǵ���Ĺ��дų�������ȫ��ʱ��ȫ����ȫ�졢���õ������Ե��ص�ġ�
2�ش�ƥ�䵼����ԭ�����ص� 21�ش�ƥ�䵼����ԭ��
�ش�ƥ��ϵͳӲ���豸��Ҫ�����¼�������ɣ�INS���شŴ��������شŻ�
�رܴ�����
�ش����ݿ�
ծ��ϵͳ��
������
���ݴ���
����ȡ
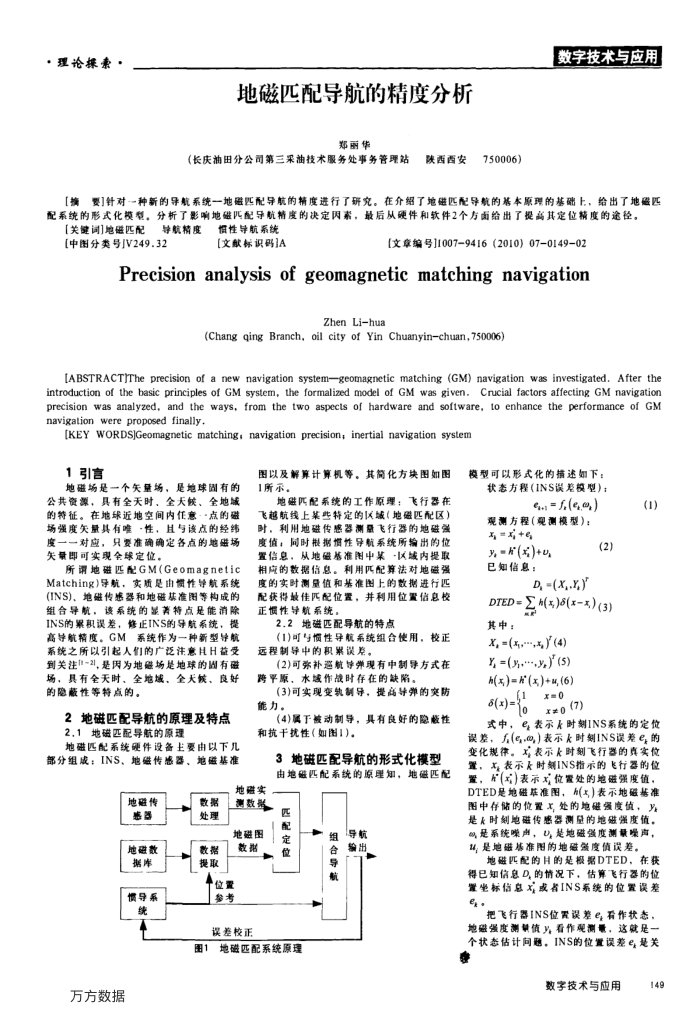
ͼ�Լ����������ȡ������ͼ��ͼ 1��ʾ��
�ش�ƥ��ϵͳ�Ĺ���ԭ�����������ڷ�Խ������ijЩ�ض������ǣ��ش�ƥ������ʱ�����õشŴ����������������ĵ���ǿ��ֵ��ͬʱ�������Ե���ϵͳ�������λ����Ϣ���ӵشŻ�ͼ��ij-��������ȡ��Ӧ��������Ϣ������ƥ���㷨�Եش�ǿ�ȵ�ʵʱ����ֵ�ͻ�ͼ�ϵ����ݽ���ƥ���ùʼ���λ�ã�������λ����ϢУ�����Ե���ϵͳ��
2.2�ش�ƥ�䵼�����ص�
(1)������Ե���ϵͳ���ʹ�ã�У��Զ���Ƶ��еĻ�����
(2)���ֲ��������������Ƶ���ʽ�ڿ�ƽԭ��ˮ����սʱ���ڵ�ȱ�ݡ�
(3)��ʵ�ֱ���Ƶ�����ߵ�����ͻ��������
(4)���ڱ����Ƶ����������õ������ԺͿ������ԣ���ͼ1)��
3�ش�ƥ�䵼������ʽ��ģ���ɵش�ƥ��ϵͳ��ԭ֪���ش�ƥ��
�ر�ʵ����Ƶ
��
�ش�ͼ����
��λ�òο�
�����
ͼ1
λ
�ش�ƥ��ϵͳԭ��
�鵼��
���
ģ�Ϳ�����ʽ�����������£�
״̬���̣�INS���ģ�ͣ���
e.=f(e,o,
�۲ⷽ�̣��۲�ģ�ͣ���
��=+e,-()+ ��֪��Ϣ��
D, -(X.X)
(2)
DTED=Zh()8(x-)(3) ����
X, (,",��,)(4)("y) (5) h(x)=(x)+,(6)
8(x)=
0
o=x X#0 (7)
(1)
ʽ�У�e��ʾkʱʣINSϵͳ�Ķ�λ��J,(eo,)��ʾkʱ��INS���e,�ı仯���ɡ��ֱ�ʾkʱ�̷���������ʵ���ã�x����ʾkʱINSָʾ�ķ�������λ�ã�()��ʾxλ�ô��ĵش�ǿ��ֵ�� DTED�ǵش���ͼ��(x)��ʾ�شŻ�ͼ�д洢��λ��x�����ĵش�ǿ��ֵ�����DZ�ʱ�̵شŴ����������ĵش�ǿ��ֵ������ϵͳ������U���ǵش�ǿ�Ȳ⾰������ u���ǵشŻ�ͼ�ĵشŵ���ֵ��
�ش�ƥ���H���Ǽ���DTED���ڻ����֪��ϢD,������£������������λ���ݱ���ϢX����INSϵͳ��λ����� e
�ѷ�����INSλ�����e,����״̬���ش�ǿ�Ȳ���ֵ�����۲����������һ��״̬���Ƽ��⣬INS��λ�����e,�ǹ���
���ּ�����Ӧ��
149