您当前的位置:首页>论文资料>近距离导引段的新设计方法
内容简介
 数事共术与变用
数事共术与变用近距离导引段的新设计方法
黄玲杜德生李文龙齐丽华
(哈尔滨理工大学自动化学院黑龙江哈尔滨150080)
设计开发
摘要:为了解决两个航天器在近距高导引投相对动力学方程的非线性国素,本文引进结构不确定性概念,将建模过程中所忽略的因素作为不确定性,同时将近距离导引段两个航天器的相对运动描速为模型跟踪问题,情助于线性不确定系统的鲁棒模型跟踪问题解决了两个航天器近距离导引段的最优交会问题、
关键调:空间交会近距离导引段不确定性鲁棒控制
中图分类号:V448
文献标识码:A
文章编号:1007-9416(2012)10-0177-02
交会对接技术是指两个航天器(一个称为目标航天器,另一个称为追踪航天器于同一时间在轨道同一位置以相同速度相会合,并在结构上连成一个整体的技术,空间的交会对接包括两部分相互衔接的空间操作;空间交会和室间对接。所谓交会是指目标航天器(即被动航天器),不作任何机动或做少量机动),在已知轨道上稳定的飞行,而追踪航天器(主动航天器),执行一系列的轨道机动,与目标航天器在空间轨道上按预定位置和时间相会1"4)。
两个飞行器在空间上要实现交会对接有两大技术难点:一是两个飞行器在空间轨道上高速飞行,时速到达28000km以上,在对接过程中,如果计算不准,控制不好,就可能发生相撞事故,二是三维空间需要两个飞行器同时在上下、左右、前后方向精确对准,差之毫厘就可能导致对接失败。本文研究第一个技术难点,把追踪航天器和目标航天器的交会过程描述为追踪航天器跟踪目标航天器的过程,建立对接结构的动力学模型,并考虐实际模型存在一定的不确定性,把模型的不确定性问题表述为鲁棒控制间题,利用鲁棒控
制方法解决对接机构的最优交会问题。 1、数学描述
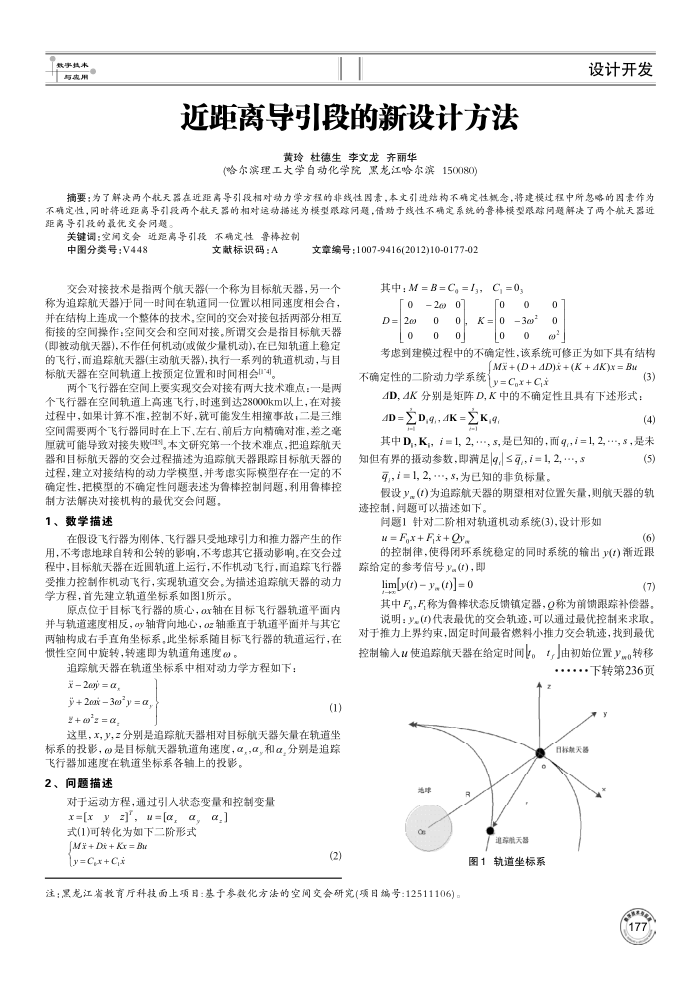
在假设飞行器为刚体、飞行器只受地球引力和推力器产生的作用,不考虑地球自转和公转的影响,不考虑其它摄动影响。在交会过程中,目标航天器在近圆轨道上运行,不作机动飞行,面追踪飞行器受推力控制作机动飞行,实现轨道交会。为描述追踪航天器的动力学方程,首先建立轨道垒标系如图1所示。
原点位于目标飞行器的质心,ox轴在目标飞行器轨道平面内并与轨道速度相反,oy轴背向地心,oz轴垂直于轨道平面并与其它两轴构成右手直角坐标系,此坐标系随目标飞行器的轨道运行,在惯性空间中旋转,转速即为轨道角速度6。
追踪航天器在轨道坐标系中相对动力学方程如下: 2j =a,
j + 2 30'y =a,
(1)
2+2=α
这里,3,为,2分别是追踪航天器相对目标航天器失量在轨道坐标系的投影,@是目标航天器轨道角速度,α,,α,和α,分别是追踪
飞行器加速度在轨道坐标系各轴上的投影。 2、问题描述
对于运动方程,通过引人状态变量和控制变量 x=[xy z]", u[α, a,α.]
式(1)可转化为如下二阶形式[M + Dx + Kr = Be
[y = C,x + C,
(2)
其中; M =B=C。=I,C, =0,
o
[020
D=20
0
0
o
0
o
0 30g2
K=
0
o
0
o 0 2
考虑到建模过程中的不确定性,该系统可修正为如下具有结构
[M + (D + 4D) + (K + 4K)x = B
不确定性的二阶动力学系统
[y = C,x + C,x
4D,4K分别是矩阵D,K中的不确定性且具有下述形式: 4D=D,9, 4K=K,9,
(3)
(4)
其中D,K,i=1,2,,5,是已知的,而g,i=1,2,",S,是未
知但有界的摄动参数,即满足9≤可,i=1,2,,5
,1=1,2,",8,为已知的非负标量。
(5)
假设>。(t)为追踪航天器的期望相对位置失量,则航天器的轨速控制,问题可以描述如下。
间题1针对二阶相对轨道机动系统(3),设计形如 u = F,x+ F,+ Oy,
(6)
的控制律,使得闭环系统稳定的同时系统的输出(t)渐近跟踪给定的参考信号(t),即
lim[y(r) y, ()] = 0
(7)
其中F。,F称为鲁棒状态反馈镇定器,0称为前馈跟踪补偿器。说明:(1)代表最优的交会轨迹,可以通过最优控制来求取。
对于推力上界约束,固定时间最省燃料小推力交会轨迹,找到最优控制输人u使追踪航天器在给定时间。,由初始位置y转移
,下转第236页
日标就天器
范球
广通踪股天器
图1轨道坐标系
注:黑龙江省教育厅科技面上项目:基于参数化方法的空间交会研究(项目编号:12511106)。