����ǰ��λ�ã���ҳ>��������>���������涯ϵͳֱ��ת�ؿ���ϵͳ�о�
���������涯ϵͳֱ��ת�ؿ���ϵͳ�о�
���ݼ��
 �����ر�������
�����ر����������ؼ���
���������涯ϵͳֱ��ת�ؿ���ϵͳ�о�
��־��������
(��������ʿ��ѧУ��ޱ����233000)
ժҪ����Թ��ڽ����涯ϵͳ�����ԡ�ʱ��ͽҺϵ��ص㣬����˲���ֱ��ת�ؿ���(direct torquecontrol,DTC)������ͬ����������涯ϵͳ������Matlab7�����Դ�ͳPID���ƺͱ��������õIJ��Խ����˶Ա�,����������ֱ��ת�ؿ��Ƹ�����ϵͳ�Ķ�����̬����,�ṩ��ϵͳ��³���ԡ�
�ؼ��ʷ���ֱ��ת�ؿ����涯ϵͳ��ȩͬ�����
��ͼ����ţ�TJ391
���ױ�ʶ��:A
����ͬ������������С�������ᡢ�����ܶȴ���ŵ㱻�㷺ʹ���ڵ������ϵͳ�У�Ϊ��ʵ�ֽ����涯ϵͳ�Ķ�����ָ̬��Ĵ����ߣ���������ͬ���������ϵͳ�ѳ�Ϊ�������涯ϵͳ�ķ�չ����ֱ��ת�ؿ�����Ϊһ�����͵Ľ���������Ʒ�ʽ����Ŀ����Takahashi�͵¹���Denpenbrock�����Zhong/1-2�״ν��걸�����������ͬ�����ֱ��ת�ؿ������ۣ�MuhammedFazlul Rahmaʵ��������ͬ�����ֱ��ת�ؿ���ϵͳ�ں㹦���������ſ��ƣ���˽��ÿ��Ʒ���Ӧ���ڽ�������ͬ������涯ϵͳ���Ź㷺��ǰ����
1PMSMֱ��ת�ؿ���
1.1PMSM����ѧģ��D
��һ�����ྲֹ����ϵ�¶��Ӵ����ı���ʽ��[V. = J(u R,i)dt
[Vg = J(ug R,ig)dt ���������ֵƽ���� w=w+
ת�ر���ʽ��T��=1.5n(w��g-Wa�����ӵ�ѹ���̱���ʽ��
ͼ
��һ,-
- jo, - R i6-86
ͼ1ֱ��ת�ؿ��Ƶ���ϵͳ�ṹͼ
(Nm) anoicy
0.16
0.18
0.2 timo (s)
0.22
0.24
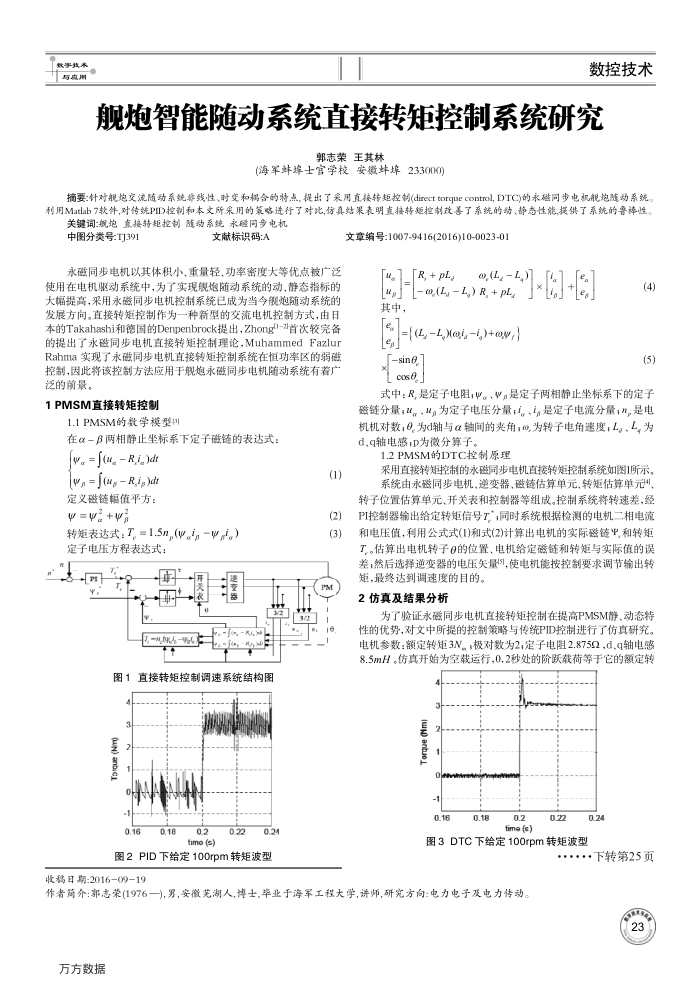
ͼ2PID�¸���100rpmת�ز���
�ո����ڣ�201609-19
(1)(2)(3)
PM
���±��:1007-9416(2016)10-0023-01
[R, + pL,
O.(L, L)
e(L, L,) R, + pL,
���� e
(L,Loi)+ow,
[sine, cos6
a
(4)(5)
ʽ�У�R,�Ƕ��ӵ��裻����V���Ƕ������ྲֹ����ϵ�µĶ��Ӵ���������"����"Ϊ���ӵ�ѹ������i�������Ƕ��ӵ���������"���ǵ����������0Ϊd��������ļнǣ�,Ϊת�ӵ���ٶȣ�L��L,Ϊ d.q����;pΪ�����ӡ�
1.2PMSM��DTC����ԭ��
����ֱ��ת�̿��Ƶ�����ͬ�����ֱ��ת�ؿ���ϵͳ��ͼ1��ʾ��ϵͳ������ͬ���������������������㵥Ԫ��ת�ع��㵥Ԫ��
ת��λ�ù��㵥Ԫ�����ر��Ϳ���������ɡ�����ϵͳ��ת�ٲ�� PI�������������ת���źŹ���ͬʱϵͳ���ݼ��ĵ����������͵�ѹֵ,���ù�ʽʽ(1)��ʽ(2)����������ʵ�ʴ�����ת�� T����������ת��0��λ�á��������������ת����ʵ��ֵ����Ȼ��ѡ��������ĵ�ѹʧ��"��ʹ����ܰ�����Ҫ��������ת
�أ����մﵽ���ٶȵ�Ŀ�ġ� 2���漰�������
Ϊ����֤����ͬ�����ֱ��ת�ؿ��������PMSM������̬���Ե����ƣ�����������Ŀ��Ʋ����봫ͳPD���ƽ����˷����о�������������ת��3N��������Ϊ2�����ӵ���2.8752d.q���� 8.5mH�����濪ʼΪ�������У�0.2�봦�Ľ�Ծ�غɵ������Ķת
(noanbo)
0.16
0.18
0.2 time (s)
0.22
0.24
ͼ3DTC�¸���100rpmת�ز���
.������ת��25ҳ
����飺��־��(1976һ).�У����ߺ���,��ʿ,��ҵ�ں������̴�ѧ����ʦ,�о����������Ӽ�����������������