��������ֱ��ת�ؿ�������ͬ��������о�
���ݼ��
 �����������Զ���
�����������Զ���2016���2��
��������ֱ��ת�ؿ�������ͬ��������о�
������Ԭ��
�����Ϲ�ҵְҵ����ѧԺ��������473000��
ժҪ�������ͬ�������ͳֱ��ת�ؿ��Ʒ����д��ڵ�ת����������Ƶ�ʲ��㶨�ȼ��⣬���һ�ָĽ��Ļ��ڵ���Ԥ�������ֱ��ת�ؿ����㷨��ͨ��������֤�˸÷�������ȷ�ԺͿ����ԣ����бȴ�ͳ����ϵͳ����Խ���ص㡣
�ؼ�����������ͬ�����ֱ��ת�ؿ��Ƶ���Ԥ����
�ڴ�ͳ��ֱ��ת�ؿ���ϵͳ�У������״̬��ͨ�������۲�����ת�ع۲�����ã���ʩ���ڵ���ϵĵ�ѹ��ͨ�����ر�ѡ������ġ����ǣ����ֿ��Ʋ��Ի����ת������������⣬������������
ֱ��ת�ؿ��Ʋ��ԣ����ϵͳ�Ķ���̬���ܡ� 1����ֱ��ת�ؿ�������
���Ŀ��ƣ�DeadbeatControl������Ҳ����Ϊ�����Ŀ��ƣ��������ֿ��Ʒ��롣������һ��ʱ������ſ��Ʒ�������Ϊ�����ֿ��ƹ����У�һ���������ڴ���һ�ģ����ľ�����ϵͳ�ĵ���ʱ���С����̡�
�����Ŀ�����������һ���ڵĵ���Ԥ��ֵ�Ŀ��Ʋ��ԣ�ʹ�ö��Ӵ�����ֵ�͵��ת�صĹ���ֵ���Ӿ�ȷ�����У����ת���붨�Ӵ�����ֵ���ƻ��ڲ���ҪPI�������������������˽ṹ����ʹ����к㶨�Ŀ���Ƶ�ʡ��˶��ӵ����۲����ĺ��Ŀ���˼����Ϊ������һ����ͨ�����Ŀ������ó������ڵĶ��ӵ�����Ԥ��ֵ��Ȼ���õ���Ԥ��ֵ���۲�������״̬��������һ���������Ŀ������������һ����Ӧʩ���ڶ��Ӷ˵ĵ�ѹʸ�����ȵ���һ�������ڿ�ʼʱ��ʩ���ڶ��Ӷˣ��Ӷ���������ϵͳʱ�������ϵ���������ʵʱ���߾��ȵĿ��ơ�
2���Ŀ�����
2.1���Ŀ�������ͼ
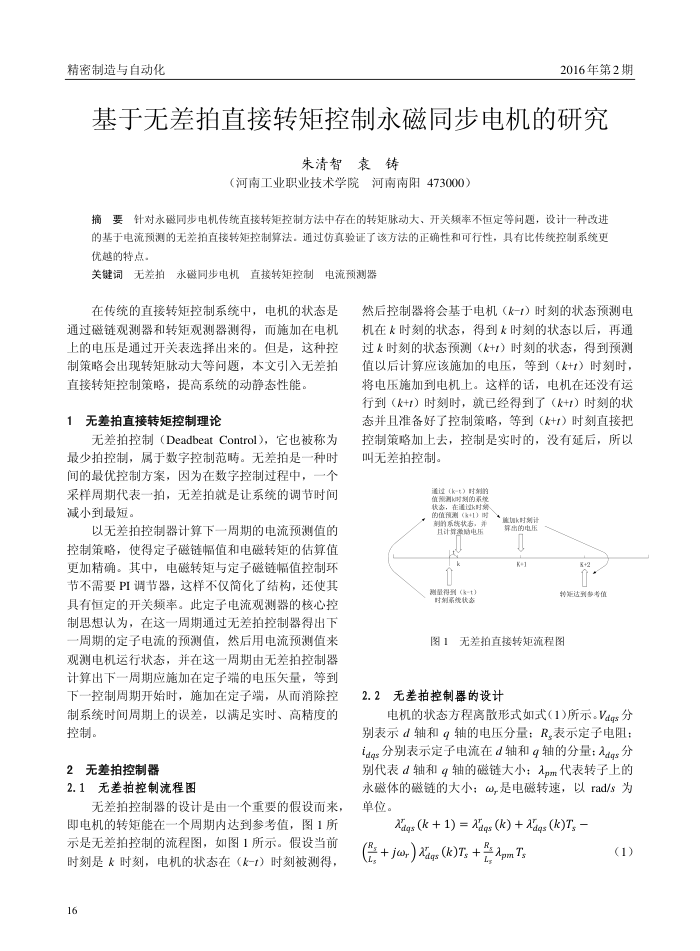
���Ŀ��������������һ����Ҫ�ļ���������������ת������һ�������ڴﵽ�ο�ֵ��ͼ1��ʾ�����Ŀ��Ƶ�����ͼ����ͼ1��ʾ�����赱ǰʱ����<ʱ�̣������״̬�ڣ�k-t��ʱ�̱���ã�
16
Ȼ�������������ڵ����k-1��ʱ�̵�״̬Ԥ������<ʱ�̵�״̬���õ�ʱ�̵�״̬�Ժ���ͨ��kʱ�̵�״̬Ԥ�⣨k+t��ʱ�̵�״̬���õ�Ԥ��ֵ�Ժ����Ӧ��ʩ�ӵĵ�ѹ���ȵ���+t��ʱ��ʱ������ѹʩ�ӵ�����ϡ������Ļ�������ڻ�û�����е���k+��ʱ��ʱ�����Ѿ��õ��ˣ�k+��ʱ�̵�״̬��Ŀ���ÿ��Ʋ��ԣ��ȵ���+��ʱ��ֱ�Ӱѿ��Ʋ��Լ���ȥ��������ʵʱ�ģ�û���Ӻ����Խ����Ŀ��ơ�
����k-t��ʱ��ֱ��K���
״�ߣ���ͨ��kʱȯֵ��(+����ʱ��ϵϴ״�£����Ҽ���������
�������ͣ�3 ʱ��ϵ��״��
xtkʱ�¼Ƶ��еĵ�ѹ
K-1
ת�Ӵﵽ�ο�ֵ
ͼ1����ֱ��ת������ͼ
2.2���Ŀ����������
�����״̬������ɢ��ʽ��ʽ(1)��ʾ��Vags��
���ʾd���9��ĵ�ѹ������R.��ʾ���ӵ��裺 ides�ֱ��ʾ���ӵ�����d���g��ķ�����Aas�ֱ����d���g��Ĵ�����С������ת���ϵ�������Ĵ����Ĵ�С��a,�ǵ��ת�٣���rad/sΪ��λ��
Adgs (k + 1) = Adgs (k) + Adgs (k)T,
(+ jr��ags(k)Tg+ApmTs
(1)