内容简介
 数事载本与度用
数事载本与度用简易伺服机控制系统
高科张大林
(南昌职业学院江西南昌330001)
数控技术
摘要:随着科技的飞速发展,单片机的应用不断地深入。在仪器仪表、智能家电和专用装备的智能化以及过程控制等方面,单片机部扮演着非常重要的角色。设计研制直流伺服电机控制以单片机作为核心部件,它可究成对直流伺服电机转速、方向、行程的闭环控制。在自动控制系统中,交流伺服电机作用是把控制电压信号或者相位信号变换成机械住移。电就是把接收到的电信号变为电机的一定转速或角位移。因此可以用单片机实现对伺股电机的数字控制。
关键词:间服电机单片机速度控制
中图分类号:TP368
文献标识码:A
市场上无线遥控飞机,遥控汽车一定会用到伺服电机当做驱动器,我们结合8051单片机来及设计一个简易的伺服电机控制系统。通过对伺服电机的精确控制,了解其工作原理以后遇到单片机控制的拉动或简易的机械式传动的机构设计都可以使用。
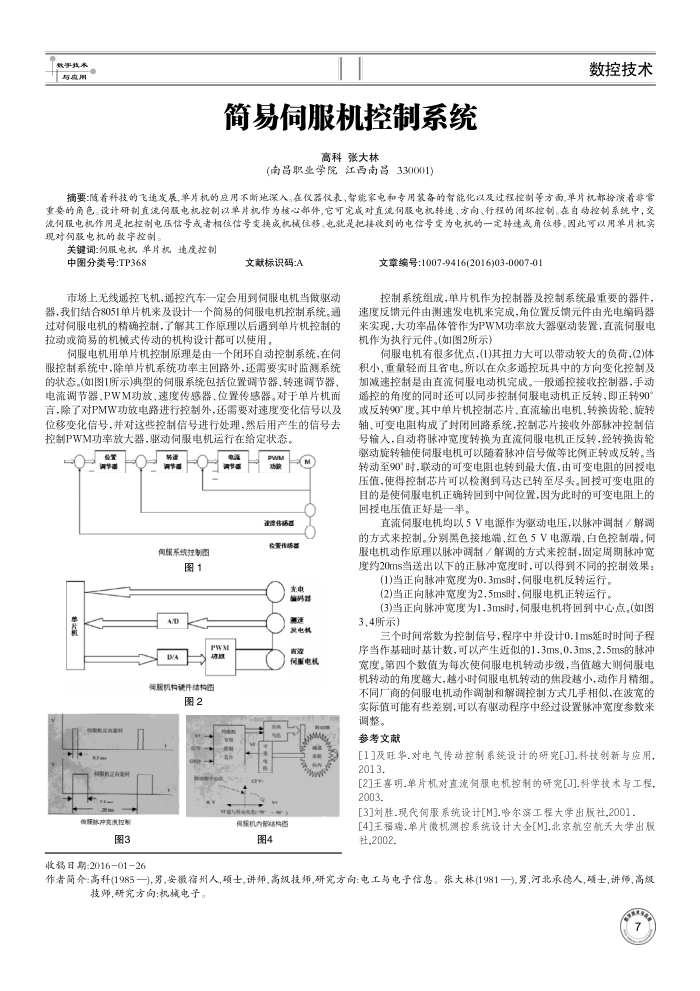
伺服电机用单片机控制原理是由一个闭环自动控制系统,在伺服控制系统中,除单片机系统功率主回路外,还需要实时监测系统的状态。(如图1所示)典型的伺服系统包括位置调节器、转速调节器,电流调节器、PWM功放,速度传感器、位置传感器。对于单片机而言,除了对PMW功放电路进行控制外,还需要对速度变化信号以及位移变化信号,并对这些控制信号进行处理,然后用产生的信号去控制PWM功率放大器,驱动伺服电机运行在给定状态。
E 通节器
30
低脉冲宽质控制
图3
收移日期:2016-0126
韩蓬 a
何眼系续控制图
图1 D
D/A
a 书
PWM 净道
网照机构硬件结构图
图2
PA
M
建德传器置情器
宽电编器
黑速电机
育莲何服电机
VEHA-
何除机内影结格图
图4
文章编号:1007-9416(2016)03-0007-01
控制系统组成,单片机作为控制器及控制系统最重要的器件,速度反馈元件由测速发电机来完成,角位置反馈元件由光电编码器来实现,大功率品体管作为PWM功率放大器驱动装置,直流伺服电机作为执行元件。(如图2所示)
伺服电机有很多优点,(1)其扭力大可以带动较大的负荷,(2)体积小,重量轻而且省电。所以在众多遥控玩具中的方向变化控制及加减速控制是由直流伺服电动机完成。一般遥控接收控制器,手动遥控的角度的同时还可以同步控制何服电动机正反转,即正转90° 或反转90°度。其中单片机控制芯片、直流输出电机、转换齿轮,旋转轴、可变电阻构成了封闭回路系统,控制芯片接收外部脉冲控制信号输人,自动将脉冲宽度转换为直流伺服电机正反转,经转换齿轮驱动旋转轴使间服电机可以随着脉冲信号做等比例正转或反转。当转动至90"时,联动的可变电阻也转到最大值,由可变电阻的回授电压值,使得控制芯片可以检测到马达已转至尽头。回授可变电阻的目的是使服电机正确转回到中间位置,固为此时的可变电阻上的回授电压值正好是一半,
直流伺服电机均以5V电源作为驱动电压,以脉冲调制/解调的方式来控制。分别黑色接地端,红色5V电源端、白色控制端。何服电机动作原理以脉冲调制/解调的方式来控制,固定周期脉冲宽度约20ms当送出以下的正脉冲宽度时,可以得到不同的控制效果:
(1)当正向脉冲宽度为0.3ms时,伺服电机反转运行。(2)当正向脉冲宽度为2.5ms时,伺服电机正转运行。
(3)当正向脉冲宽度为1.3ms时,何服电机将回到中心点。(如图 3、4所示)
三个时间常数为控制信号,程序中并设计0.1ms延时时间子程序当作基础时基计数,可以产生近似的1.3ms,0.3ms.2.5ms的脉冲宽度,第四个数值为每次使何服电机转动步级,当值越大则伺服电机转动的角度越大,越小时伺服电机转动的焦段越小,动作月精细。不同厂商的伺服电机动作调制和解调控制方式几乎相似,在波宽的实际值可能有些差别,可以有驱动程序中经过设置脉冲宽度参数来调整。
参考文献
[1]及旺华.对电气传动控制系统设计的研究[J].科技创新与应用, 2013.
[2]王喜明.单片机对直流例服电机控制的研究[J].科学技术与工程, 2003.
[3]刘胜.现代伺服系统设计[M].略尔滨工程大学出股社,2001
[4]王福瑞.单片微机测控系统设计大全[M].北京航空航天大学出版社,2002.
作者简介:高科(1985一),男,安撤宿州人,硕士,讲师,高级技师,研究方向:电工与电子信息。张大林(1981一),男,河北承德人,颈士,讲师,高级
技师,研究方向:机械电子。
上一章:基于知识表达和推理的烟草病虫害防治系统
下一章:经销商管理系统发展的方向