Galileo∕GPS组合导航定位误差研究
内容简介
 应用研究
应用研究Galileo/GPS组合导航定位误差研究
邵艳侠董立
(沈阳理工大学装备工程学院辽宁沈阳110159)
摘要:作为国家信息体系和设施的重要组成部分,卫星导航系统得到了飞速的发展,其应用领城从单纯军事部门新扩展到更加广泛的民用行业。本文介绍了GPS和Galileo星座的组成及其组合导航定位误差分析,并阐遂了两系统组合导航的定位优势。
关键词:GPSGalileoGalileo/GPS组合导航
中图分类号:TP29
文献标识码:A
文章编号:10079416(2011)06005802
利用太阳、月球和其他自然天体导航已有数千年历史,由人造天体导航的设想虽然早在19世纪后半期就有人提出,但直到20世纪60年代才开始实现。目前的卫星导航系统,以美国的 GPS(Global Positioning System)最为突出。然而,由于美国的GPS只对本国军方提供精确的定位信号,而提供给其他用户的则是加了于扰的低精度信号,因此定位服务并不能得到保障。为了打破其华断地位,摆脱对其的依赖,以免受制于人,世界各国及其相关组织纷纷建立起自己的卫星导航定位系统。例如,俄罗斯的 GLONASS、欧洲的Galileo、我国自主研发的“北斗”,以及印度正在研制的“印度区域导航卫星系统”(IRNSS)、日本正在开发兼具导航定位、移动通信和广播功能的“准天顶”卫星导航定位系统等。
随着GPS系统现代化和Galileo系统的逐步实施,若将Galileo系统与GPS系统组合起来,届时天空中将有50颗左右的卫星用于定位服务,可以得到较高的定位精度,因此Galileo/GPS组合系统将
成为发展的必然趋劳。 1、单个卫星导航系统
全球定位系统GPS是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。GPS系统由空间卫星星座、地面监控系统及用户设备组成。GPS空间星座部分由24颗CPS卫星(含3颗备用卫星)组成,卫星均匀分布于倾角为55°的6个轨道面上,轨道平均高度约为20200km,卫星轨道近似为圆轨道,每条轨道上非均匀分布了4颗卫星,卫星运行周期约11小时 58分。每颗GPS卫星发射两个载波(1575.42MHz/L1和1227.60MHz/ L2)信号,在其上用相位调制技术加载了测距码和导航电文,供用户接收机使用。
儒利略系统是欧洲自主的、独立的、完全非军方控制管理的全球多模式卫星定位导航系统,提供高精度、高可靠性的定位服务。Galileo星座由分布在3个圆形轨道上的30颗题中轨卫星(ME0)构成,每个轨道面上有9颗工作卫星(近点角相差40°)和1颗备用卫星,轨道倾角为56°,轨道高度为23616km,卫星运行周期为14.4小时。Galilee系统还能够和美国的GPS、俄罗斯的
GLONASS系统实现多系统内的相互合作。 2、组合导航系统
由于各独立卫星系统的星座规模有限,提供卫星定位服务的精度、可靠性、安全性和可用性有时无法得到保障,其至难于满足导航定位的要求。面采用多星座组合则可大大提高可见星的数目,组成更好的卫星几何分布,降低精度稀择因子,为定位精度的提高提供了可能,并且多星座组合还可使星座的允余度提高,从而可保证定位精度的可靠性。因此,多卫星导航系统组合导航是未来的发展趋势。
58
万方数据
尽管Galileo在定位精度等指标方面将超越GPS,但仅仅Galileo 系统本身还有不足之处,比如总卫星数仍然很有限,因而覆盖率仍有待提高。若不考虑政治因素,单从技术方面来考患,将 Galileo和GPS系统合二为一将带来多方面的益处,可以提高抵御非人为干扰的能力,可用卫星数将近翻一番,测控成功率将更高,可以改善导航定位系统的可用性和连续性等指标,使SBAS(SatelliteBasedAugmentationSystem)的能力得到更进一步的提高。
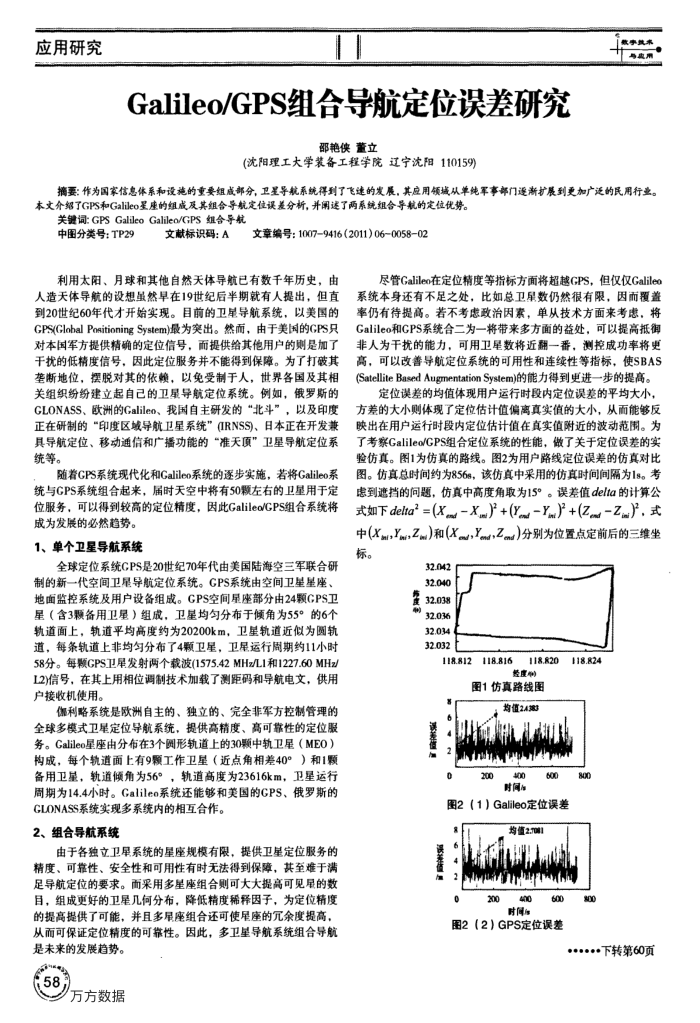
定位误差的均值体现用户运行时段内定位误差的平均大小,方差的大小则体现了定位估计值偏离真实值的大小,从而能够反映出在用户运行时段内定位估计值在真实值附近的波动范围。为了考察Galileo/GPS组合定位系统的性能,做了关于定位误差的实验仿真。图1为仿真的路线。图2为用户路线定位误差的仿真对比图。仿真总时间约为856s,该仿真中采用的仿真时间间隔为18。考虑到遮挡的间题,仿真中高度角取为15°。误差值delta的计算公式如下delta=(X-X+(Y-Y)+(Z-Z),式中(XYZ)和(X,Ym,Z)分别为位置点定前后的三维坐标。
32.042 32.040 32.038 32.036 32.034 32.032
118.812
118.816
118.820
经度
图1仿真路线图
值24383
hht
0
200
400 时间:
600
图2(1)Galileo定位误差
2708
200
400
600
时间
图2(2)GPS定位误差
118.824 800
800
*.*下转第60页