����ǰ��λ�ã���ҳ>��������>�綯���ֳ���λ���������о�
�綯���ֳ���λ���������о�
���ݼ��
 Ӧ���о�
Ӧ���о��綯���ֳ���λ���������о�
�����������
(��������ѧԺ��������110136)
���¹������
ժҪ����Ϊ���ܽ�ͨϵͳ����Ҫ��ɲ���,���䶨λ����ϵͳ�ṩ�˱�Ҫ��������Դ����ϵͳ�Ե綯���ֳ�Ϊ����ģ�ͣ�ȷ����϶�λ����,GPS ���Ƕ�λ����ϵͳ�ͺ������㼼�����,����DSP�����ݴ���������ͨ�Žӿڣ������������ʵʱ��ʾ��PDA��,ʵ���Գ����Ķ�λ���������ϵͳ���Ժ�ʵ��,��֤�˸÷�������ȷ�ԺͿ����ԣ�
�ؼ���:��λ����GPS��������DSP ��ͼ����ţ�TJ630.1
���ױ�ʶ�룺A
1����
���ž��á���ѧ�����ĸ��ٷ�չ�������������˸��ӵĽ�ͨ�����������ڽ�ͨϵͳ�ĸ����Ժ�ӵ���ȣ���ͨ����Խ��ͻ�������ܽ�ͨϵͳӦ�˶�������Ϊ���ܽ�ͨ����Ҫ��ɲ��֣�������λ����ϵͳ��Ϊ�˸�������о��ص㡣
������λ����ϵͳ���ڵ�����Ϣϵͳ(GIS)������������ֻ��صĻ����ϣ����ü����ֶζԳ�����λ��ȷ�����ŵ���ʻ·�ߣ��Գ������и��ٶ�λ���û��ɲ�ѯλ�á��ٶȡ�����״̬�Ȳ�����Ϊ�����ĵ��ȹ����ṩ���ӻ����ݣ����ٳ���ʱ�估��Դ���ģ���Ч�赼�����������ڴ����Ԥ�����Գ����ȷ�����Ϊ���������Զ�����
�������ͨ�ŵȼ����ķ�չ��Ϊ��ᴴ�����ľ���Ч�档 2��λ����ϵͳ����
2.1�綯���ֳ�����ģ��
���߳���
��������
���u���
�罯����
ͼ1���������綯���ֳ�����ģ�� GPS��������
��
��������
��������
����
������Ϣ����ϵͳ
����������Ԫ PDA
�˻���������
ͼ2ϵͳ�ṹͼ
�ո����ڣ�2015-12-28
���±��:1007-9416(2016)02-0098-01
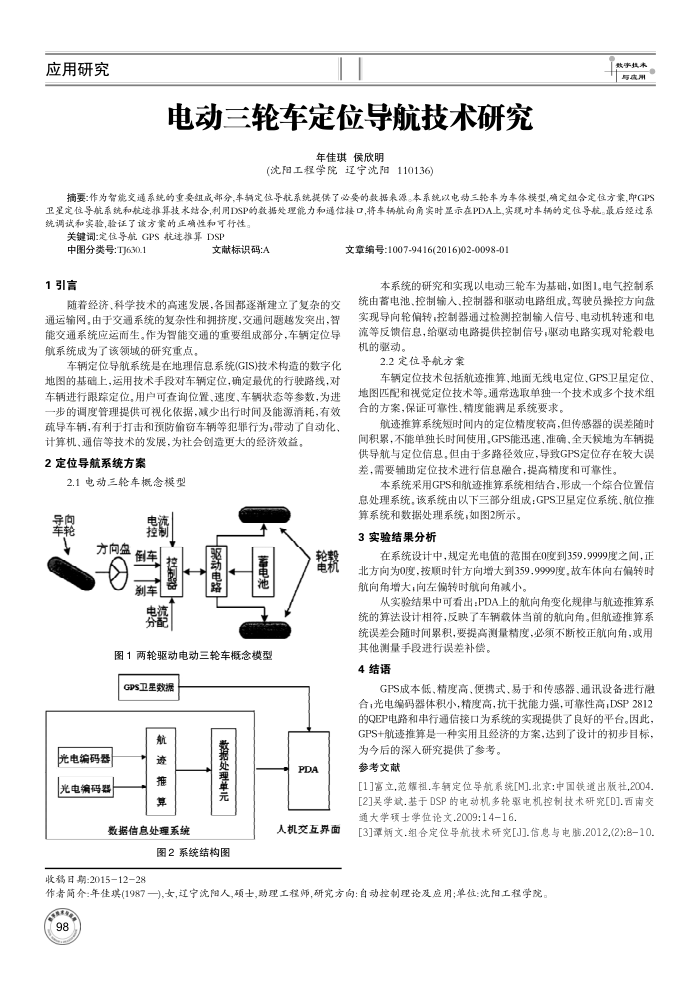
��ϵͳ���о���ʵ���Ե綯���ֳ�Ϊ��������ͼ1����������ϵͳ�����ء��������ˡ���������������·��ɣ���ʻԱ�ٿط�����ʵ�ֵ�����ƫת��������ͨ�������������źţ��綯��ת�ٺ͵����ȷ�����Ϣ����������·�ṩ�����źţ�������·ʵ�ֶ���������������
2.2���������
������λ���������������㣬�������ߵ綨λ��GPS���Ƕ�λ����ͼƥ����Ӿ���λ�����ȡ�ͨ��ѡȡ����һ����������������ϵķ�������֤�ɿ��ԡ�����������ϵͳҪ��
��������ϵͳ��ʱ���ڵĶ�λ���Ƚϸߣ����������������ʱ����ۣ����ܵ�����ʱ��ʹ�ã�GPS��Ѹ�١�ȷ��ȫ����Ϊ�����ṩ�����붨λ��Ϣ�������ڶ�·��ЧӦ������GPS��λ���ڽϴ�����Ҫ������λ����������Ϣ�ںϣ���߾��ȺͿɿ��ԡ�
��ϵͳ����GPS�ͺ�������ϵͳ���ϣ��γ�һ���ۺ�λ����Ϣ����ϵͳ����ϵͳ��������������ɣ�GPS���Ƕ�λϵͳ����λ��
��ϵͳ�����ݴ���ϵͳ����ͼ2��ʾ�� 3ʵ��������
��ϵͳ����У��涨���ֵ�ķ�Χ��0�ȵ�359.9999��֮�䣬��������Ϊ0�ȣ���˳ʱ�뷽������359.9999�ȣ��ʳ�������ƫתʱ�������������ƫתʱ�����Ǽ�С��
��ʵ�����пɿ�����PDA�ϵĺ���DZ仯�����뺽������ϵͳ���㷨����������ӳ�˳������嵱ǰ�ĺ���ǡ�����������ϵͳ������ʱ���ۻ���Ҫ��߲������ȣ����벻��У������ǣ�����
���������ֶν��������� 4����
GPS�ɱ��ͣ����ȸߡ���Яʽ�����ںʹ�������ͨѶ�豸�����ںϣ������������С�����ȸߣ�����������ǿ���ɿ��Ըߣ�DSP2812 ��QEP��·�ʹ���ͨ�Žӿ�Ϊϵͳ��ʵ���ṩ�����õ�ƽ̨����ˣ� GPS+����������һ��ʵ���Ҿ��õķ������ﵽ����Ƶij���Ŀ�꣬
Ϊ���������о��ṩ�˲ο����ο�����
[1]��������ҫ��.������λ����ϵͳ[M��.�������й�����������,2004[2]��ѧ��.����DSP�ĵ綯��������������Ƽ����о�[D].���Ͻ�ͨ��ѧ��ʿѧλ����.2009:14-16
[3]̶��.��϶�λ���������о�[J].��Ϣ�����.2012,(2):8-10.
����飺�����(1987һ),Ů,����������,˶ʿ,��������ʦ���о������Զ��������ۼ�Ӧ�ã���λ����������ѧԺ�� 98