����CPLD������Ӧ�״�Ѳ������ϵͳ�����
���ݼ��
 �������
����������ؼ���
����CPLD������Ӧ�״�Ѳ������ϵͳ�����
����
(�б���ѧ��Ϣ̽���봦�������о���ɽ��̫ԭ030051)
ժҪ�����Ľ�������CPLDΪ���ĵļ���������ʾ�����ⱨ�������Լ������ƶ�ϵͳ�İ�����Ӧ�״��˺�����ϵͳ����ϵͳ��������Ӳ����ϵķ���,����ģ�黯�Ͷ��û����ص㡣���״��ź�ϵͳ���ݳ��������ԭ������,���ÿ����Լ켼�����Ż�����Ӳ������,����õĽ�������������ʾ��ͬʱ�������ⱨ�����ڽ�������¶����������ƶ���
�ؼ���:CPLD���������VHDL����溽
��ͼ����ţ�TP274.53
���ױ�ʶ�룺A
�����ִ���ͨ��������������������Ҳ�������ӣ�������ͨ�¹��ѳ�Ϊ�Ͼ���ȫ����������⡣�����йز��ŵļ��㣬������Ϊ 70Km/hʱ��˾����ӳ�˻�1��������Ҫǰ��Լ19.5�ף�����ҹ���
st C4-
oaekh
Siat
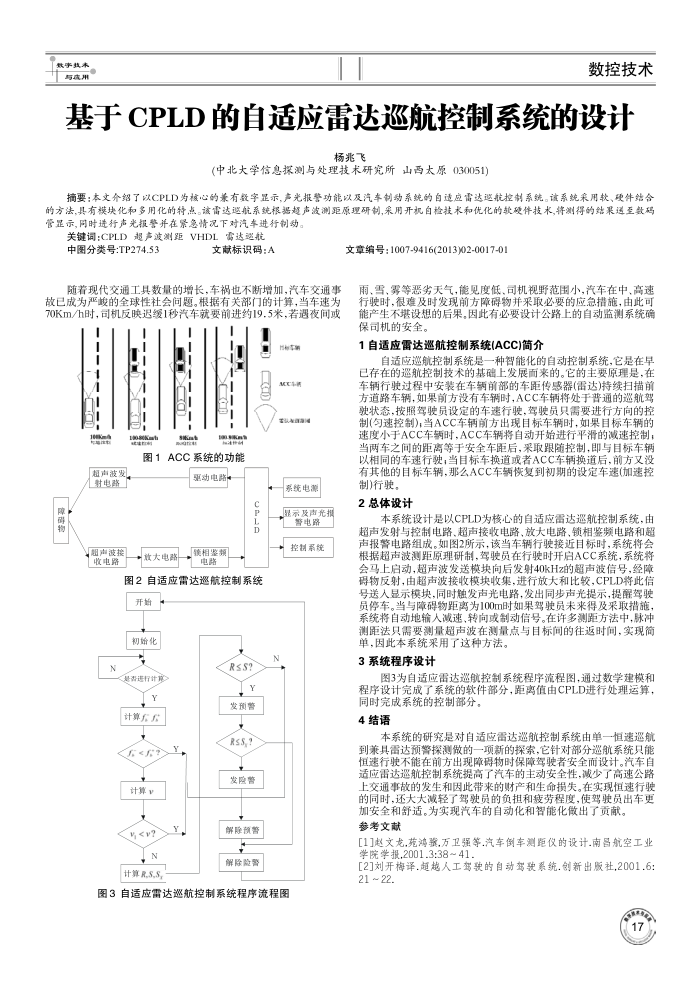
ͼ1ACCϵͳ�Ĺ���
�����������·
���������յ�·
+Ч���·
������·
ϵͳ��Դ
��ʾ�����ⱨ
n
�����Ƶ��·
ͼ2����Ӧ�״�Ѳ������ϵͳ
ʿ��ʼ��
RSS?
����Υ�мƵ�
��Ԥ��
����6
Rss,?
<
���վ�
����,v?
N ����R,S,S,
ȼ�����ϵͳ
ͼ3����Ӧ���Ѳ������ϵͳ��������ͼ
���±�ţ�1007-9416(2013)02-0017-01
�ꡢѩ�����ȶ����������ܼ��ȵ͡�˾����Ұ��ΧС���������С�������ʻʱ�����Ѽ�ʱ����ǰ���ϰ��ﲢ��ȡ��Ҫ��Ӧ����ʩ���ɴ˿��ܲ�����������ĺ��������б�Ҫ��ƹ�·�ϵ��Զ����ϵͳȷ��˾���İ�ȫ��
1����Ӧ�״�Ѳ������ϵͳ(ACC)���
����Ӧ�ź�����ϵͳ��һ�����ܻ����Զ�����ϵͳ�����������Ѵ��ڵ�Ѳ�����Ƽ����Ļ����Ϸ�չ�����ġ�������Ҫԭ���ǣ��ڳ�����ʻ�����а�װ�ڳ���ǰ���ij��ഫ����(�״�)����ɨ��ǰ����·���������ǰ��û�г���ʱ��ACC������������ͨ��������ʻ״̬�����ռ�ʻԱ�趨�ij�����ʻ����ʻԱֻ��Ҫ���з���Ŀ���(���ٿ���)����ACC����ǰ������Ŀ�공��ʱ�����Ŀ�공�����ٶ�С��ACC����ʱ��ACC�������Զ���ʼ����ƽ���ļ��ٿ��ƣ�������֮��ľ�����ڰ�ȫ�����ȡ������ƣ�����Ŀ�공������ͬ�ij�����ʻ����Ŀ�공��������ACC����������ǰ��û��������Ŀ�공������ôACC�����ָ������ڵ��趨����(���ٿ���)��ʻ��
2�������
��ϵͳ�������CPLDΪ���ĵ�����Ӧ�״�Ѳ������ϵͳ���ɳ�����������Ƶ�·���������յ�·���Ŵ��·�������Ƶ��·�ͳ���������·��ɡ���ͼ2��ʾ���õ�������ʻ�ӽ�Ŀ��ʱ��ϵͳ������ݳ��������ԭ�����ƣ���ʻԱ����ʻʱ����ACCϵͳ��ϵͳ������������������������ģ�������40kHz�ij������źţ����ϰ��ﷴ�䣬�ɳ���������ģ���ռ������зŴ�ͱȽϣ�CPLD�����ź�������ʾģ�飬ͬʱ���������·������ͬ��������ʾ�����Ѽ�ʻԱͣ���������ϰ������Ϊ100mʱ�����ʻԱδ���ü���ȡ��ʩ��ϵͳ���Զ������˼��١�ת����ƶ��źš�����������У������෨ֻ��Ҫ�����������ڲ�������Ŀ��������ʱ�䣬ʵ�ּ�
������˱�ϵͳ���������ַ����� 3ϵͳ�������
ͼ3Ϊ����Ӧ�״�Ѳ������ϵͳ��������ͼ��ͨ����ѧ��ģ�ͳ�����������ϵͳ���������֣�����ֵ��CPLD���д������㣬
ͬʱ���ϵͳ�Ŀ��Ʋ��֣� 4����
��ϵͳ���о��Ƕ�����Ӧ�״�Ѳ������ϵͳ�ɵ�һ����Ѳ��������״�Ԥ��̽������һ���µ�̽��������Բ���Ѳ��ϵͳֻ�ܺ�����ʻ������ǰ�������ϰ���ʱ���ϼ�ʻ�߰�ȫ����ơ���������Ӧ�״�Ѳ������ϵͳ�����������������ȫ�ԣ������˸��ٹ�·�Ͻ�ͨ�¹ʵķ�������˴����IJƲ���������ʧ����ʵ�ֺ�����ʻ��ͬʱ�����������˼�ʻԱ�ĸ�����ƣ�ͳ̶ȣ�ʹ��ʻԱ������
�Ӱ�ȫ�����ʡ�Ϊʵ���������Զ��������ܻ��������ס��ο�����
[1]������,Է�迥,����ǿ��.����������ǵ����-�ϲ����չ�ҵѧԺѧ��,2001.3:38~41
[2]����÷��.��Խ�˹���ʻ���Զ���ʻϵͳ.���³�����,2001.6�� 21 ~22.